










Servicios Personalizados
Revista

Articulo
 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkRevista de Ciencia y Tecnología
versión On-line ISSN 1851-7587
Rev. cienc. tecnol. no.19 Posadas ene. 2013
INGENIERÍA, TECNOLOGÍA E INFORMÁTICA
Desarrollo de estructuras de fibra óptica estrechada (TAPER) para la detección de vibraciones mecánicas
Development of tapered optical fibers structures (taper), to detect mechanical vibrations
Yoany Rodríguez García, Wilfredo Falcón Urquiaga, Sergio L. Cabarrouy Fernandez-Fontecha, Yosbel Camacho Izquierdo, Alexei Blanco Ortiz, Carmen Lidia Cardozo Zambrana
1 Universidad de Pinar del Río, Cuba, Martí 270, final. Departamento de Telecomunicaciones y Electrónica.
2 Instituto Superior Pedagógico "Rafael Maria de Mendive" Calle "Los Pinos". Departamento de Matemática.
. Yoany Rodríguez García1
Ingeniero en Telecomunicaciones 2003. Master en Nuevas Tecnologías para la Educación. UPR. 2007 Doctor en Ciencias Técnicas, La Habana, 2011. Docente en óptica, radiocomunicaciones y sistemas de Telecomunicaciones. Jefe de la carrera de telecomunicaciones en la UPR , profesor Auxiliar. Desarrolló aplicaciones de comunicaciones ópticas durante las estancias en el centro de investigaciones de FIOCRUZ, Brasil 2007 y la Universidad Pública de Navarra, 2009, 2010 y 2011. Especialista en aplicaciones ópticas autor de ocho artículos referados y revisor de las revista "International Journal of Telecommunication Systems" y "Journal of sensors". yoha@tele.edu.cu
. Wilfredo Falcón Urquiaga1
Ingeniero en Telecomunicaciones y Electrónica, Doctor en Ciencias Técnicas y Profesor Titular del Departamento de Telecomunicaciones y Electrónica de la Universidad de Pinar del Río (UPR) desde 1996 y hasta la fecha. Jefe de dicho Departamento entre el año 2004 y 2007. Profesor del Departamento de Electrónica de la Escuela Superior de Tecnología de la Universidad del Estado de Amazonas en Brasil, desde el año 2007 hasta el año 2009. Decano de la Facultad de Informática y Telecomunicaciones de la UPR, entre el 2009 y el 2011 y Decano de la Facultad de Ciencias Técnicas de la UPR desde el año 2011 hasta la fecha actual. Miembro de la Academia de Ciencias de Cuba entre 2007 y 2011. Miembro actual del Tribunal Nacional Permanente de Telecomunicaciones y Electrónica de la Comisión Nacional de grados científicos. falcon@tele.upr.edu.cu
. Sergio Lázaro Cabarrouy Fernández-Fontecha1
Ingeniero en Telecomunicaciones. Doctor en Ciencias Técnicas, La Habana, 2004. Docente en óptica y radiocomunicaciones. Director de procesos de formación tecnológica de nivel medio y superior a nivel nacional. Investiga en Inteligencia Artificial, Minería de Datos, y Sistemas de Comunicaciones Inalábricas. sergio@vrect.upr.edu.cu
. Yosbel Camacho Izquierdo1
Ingeniero en Telecomunicaciones y Electrónica. UPR. 2003. Máster en Nuevas Tecnologías para la Educación. UPR. 2007. Profesor en el departamento de telecomunicaciones y electrónica de la facultad de Ciencias Técnicas de la Universidad de Pinar del Río. Actualmente jefe del Departamento de telecomunicaciones y electrónica. Su actividad investigativa está asociada con: Aplicaciones telemáticas y redes de computadoras, Análisis y desarrollo de bases de datos aplicadas a la educación superior, software de soporte a los procesos docentes educativos en la educación superior. yosbel@ict.upr.edu.cu
. Alexei Blanco Ortiz1
Ingeniero en Telecomunicaciones y Electrónica. UPR. 1999. Máster en Telemática. CUJAE. 2003. Desde 1999 a la fecha: Profesor en el departamento de telecomunicaciones y electrónica de la facultad de Ciencias Técnicas de la Universidad de Pinar del Río. Actualmente jefe de la disciplina de sistemas de telecomunicaciones. Su actividad investigativa está asociada a las líneas de investigación: Aplicaciones telemáticas y redes de computadoras y Análisis de pérdidas de paquetes IP en aplicaciones de voz. Las investigaciones con mayor impacto en las que ha participado son: Desarrollo de aplicaciones de transmisión de VoIP soportadas por el PIC18f452, Aplicación de la técnica FMMSE para la mitigación de errores producidos en la transmisión de voz sobre redes IP. alexei@tele.upr.edu.cu
. Carmen Lidia Cardoso Zambrana2
Licenciada en Física 1981. Máster en Matemática Avanzada para Ingenieros. Profesor Auxiliar del Instituto superior pedagógico de Pinar del Río. Áreas de investigación. Relaciones interdisciplinarias aplicadas a la matemática superior. Co-autora de programas de Matemática Superior para Universidades Pedagógicas. Asesora de proyectos vinculados con aplicaciones ópticas vinculados a la medición de parámetros físico-químicos.
Resumen
En este trabajo se desarrolla un sensor a base de fibras ópticas estrechadas (FOE) o Taper, como también se le conoce, que permite medir las vibraciones en motores eléctricos utilizando el modelo mecánico de cantiléver o barra en voladizo. El objetivo de este estudio es caracterizar el sensor de fibra estrechada, en función del rango de medición de vibraciones, de manera que permita medir con exactitud las fallas inducidas por vibraciones en motores rotarios eléctricos. Para ello se hace un estudio teórico del sistema mecánico utilizado, luego se modela el comportamiento de la estructura utilizando el simulador ANSYS para determinar los valores de frecuencias que se pueden medir con el sensor. Luego se desarrolla un montaje práctico del sistema de medición donde se utiliza un LASER a 1310 nm como fuente de luz, un foto detector InGasAs 675RE Rifocs, un acelerómetro comercial ISOTRON modelo 256-100, para la caracterización en frecuencias y la obtención de la frecuencia natural del modelo. Por último se acopla el sistema a un motor eléctrico al cual se le introducen fallas por vibración que son detectadas por el sistema desarrollado.
Palabras clave: Fibra óptica; Taper; Cantiléver; Vibraciones.
Abstract
A vibration optical fiber sensor based on Tapered single mode fiber and cantilever principles was designed and characterized in this work. The cantilever method used allowed to measure vibrations in industrial equipment induced by mechanical and electrical failure. The device assembled was compared with a commercial accelerometer ISOTRON model 256-100 with a sensitivity of 99.66mV/g, by using an oscilloscope with a Fast Fourier Transformed, in order to compare and analyze the frequency response of the optical fiber sensor. The sensor developed was coupled to an electrical engine, in order to measure the vibrations induced by electrical failure.
Key words: Optical Fiber; Cantilever; Taper; Vibrations.
Introducción
El estudio de las vibraciones en motores eléctricos ha sido un tema recurrente en las investigaciones referidas a los sensores electrónicos. En la actualidad otro tipo de sensores han venido sustituyendo paulatinamente a los sensores tradicionales, estos son los sensores de fibra óptica. Los noveles sensores aventajan a sus predecesores en velocidad de respuesta, inmunidad a ruidos e interferencias electromagnéticas, así como en rango de aplicaciones o multifuncionalidad de los dispositivos.
Materiales y métodos
Este trabajo se desarrolló con la utilización de fibra óptica monomodo estrechada en una empalmadora y cortadora de fibra óptica Ericsson FSU-905. Para la modelación del sistema de medición de utilizó el simulador ANSYS. La comprobación de los resultados se hizo utilizando una fuente de luz láser de 1mW a 1310 nm de longitud de onda y un fotodetector InGasAs 675RE Rifocs. La caracterización del Taper se desarrolló utilizando un sistema al que se le incorporó un acelerómetro piezoeléctrico comercial Isotron modelo 256-100 con una sensibilidad de 99.66mV/g, un osciloscopio con un módulo de transformada rápida de Fourier (FFT) para mostrar ambas señales (señal del Taper y señal del acelerómetro) en el dominio de la frecuencia. Las señales de vibración fueron obtenidas de un vibrador TIRA-TV-50018 controlado por un amplificador modelo TIRA-BAA 60. Finalmente, se desarrollaron mediciones de vibración de un motor eléctrico a diferentes frecuencias y en el momento de encendido.
Diseño general del sistema de medición taper
El objetivo de este estudio es construir y caracterizar un sensor de fibra estrechada o Taper, en función de un determinado rango de vibraciones, de manera que permita medir con exactitud las fallas inducidas por este parámetro en maquinarias rotatorias industriales.
Estructuras Taper o fibras estrechadas
La fibra óptica estrechada (FOE) o Taper es objeto de estudio en el área de la óptica aplicada desde hace más de dos décadas, dispositivos tales cómo acopladores, multiplexores en longitud de onda, concentradores de haz, dispositivos acusto-ópticos o sensores son las principales aplicaciones conocidas de este tipo de estructura óptica [1-5].
Los dispositivos de FOE pueden ser aprovechados como sensor de campo evanescente, principalmente sensores químicos donde se aprovecha la zona más estrecha de la estructura para depositar sustancias cuyas propiedades de absorción óptica cambia en función del parámetro que se desea medir [1,4,5,7,9,10,11]. Sensores de pH, humedad, concentración de gases entre otros han sido reportados con anterioridad [9-11]. También, se pueden fabricar sensores de deformación de materiales basándose en el estirado de FOE multimodo embebida en un material.
La figura 1 muestra la estructura de un Taper donde se distinguen: la (zona I) o de contracción, la (zona II) o central, también conocida como cintura del Taper y la (Zona III) o de expansión [2-5].
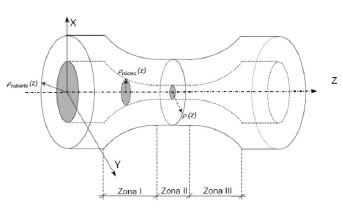
Figura 1: Estructura por zonas de una fibra óptica estrechada (Taper).
En la (Zona I) la fibra óptica se va estrechando hasta que alcanza unas proporciones que se mantienen durante cierta longitud (Zona II), para posteriormente volver a ensancharse y alcanzar las dimensiones originales (Zona III). En el esquema núcleo ρ (z) es la función que caracteriza el radio del núcleo con respecto a la coordenada z, cubierta ρ (z) es el radio de la cubierta o recubrimiento en la zona de máximo estrechamiento de la fibra.
La frecuencia normalizada del núcleo núcleo V , es el parámetro que define la posibilidad de la propagación del modo fundamental por la fibra [1-7]. En este modo la luz se propaga paralela al eje de la fibra y se tiene:

Donde núcleo n y cubierta n , son los índices de refracción del núcleo y la cubierta para una longitud de onda determinada.
El mencionado criterio para el modo fundamental es [3]:
![]()
En el Taper la relación (S) entre los diámetros de la cubierta y el núcleo permanece constante, como se muestra en la ecuación (3).

En la (Zona I) el modo fundamental se propaga normalmente. A medida que se avanza en el eje (z) hacia el estrechamiento, como el modo fundamental cada vez está menos confinado, el índice efectivo o índice del núcleo se aproxima al índice de refracción del recubrimiento. Al reducirse el núcleo el guiado de luz se realiza por la estructura del recubrimiento, es decir, el modo fundamental no puede ser confinado en el núcleo y pasa a ser conducido por el recubrimiento. Cuando sucede esto se dice que se ha alcanzado el valor de la frecuencia normalizada de corte, [2-5] Vcc expresada por la siguiente ecuación:

Para una fibra monomodo comercial (S) toma un valor de 12.7 esto supone un valor de Vcc de 0.887 [3]. El valor del diámetro de cintura para el cual la frecuencia normalizada toma el valor de Vcc se le denominará diámetro de corte.
En la (Zona II) la fibra se comporta como una guía de onda multimodo, ya que la cubierta no cumple la ecuación (1).
En la (Zona III), el diámetro del núcleo y de la cubierta retoma su tamaño original, por lo que la luz que antes se guiaba por múltiples modos en el recubrimiento pasa al núcleo de la fibra y se propaga en el modo fundamental como originalmente lo hacía antes del estrechamiento.
Métodos de fabricación de sensores de campo evanescente basados en Tapers
Para lograr el estrechamiento en una fibra óptica existen varios métodos:
1. Estirar la fibra mientras se calienta con un láser, o cualquier otra fuente de calor convencional. [1,3]
2. Realizar un ataque químico sobre la fibra [3]
3. Uso de un arco eléctrico. [3-6]
El tercer método es el más utilizado, por la facilidad que ofrece para controlar la longitud de la cintura del Taper, así como el diámetro de corte; ambos, parámetros críticos, como se analizó anteriormente. La otra gran ventaja es que las máquinas de fusionar fibras pueden ser perfectamente utilizadas para la construcción de este tipo de estructuras, lo que permite la reutilización del equipamiento, tanto en la industria como en el laboratorio.
Los Tapers desarrollados para diversas aplicaciones se fabrican en serie, bajo metodologías protegidas por patentes y son producidos bajo demanda. En la figura 2 se puede observar un Taper construido con una máquina de fusión Ericsson FSU-905, cuya longitud es de aproximadamente 1 mm y el diámetro mínimo de la cintura de 20 micras.

Fig. 2: Taper fabricado bajo condiciones de fusión por arco eléctrico.
Para el caso de estudio los Taper fueron construidos utilizando una llama incidente en la Zona de estrechamiento, debido a que la fibra monomodo había sido cortada con anterioridad para que la zona estrechada estuviera cerca de la punta de la fibra. De esta forma se podía garantizar que la misma fibra funcionara cómo un cantiléver, siendo la masa del modelo la zona final de la fibra, tal como se muestra en la figura 3.
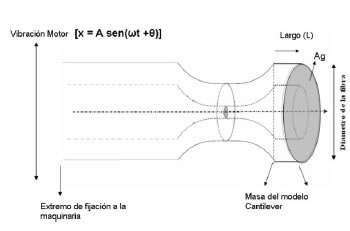
Figura 3: Modelo Cantiléver con fibra óptica estrechada para la medición de vibraciones.
En esta figura se muestra además que la fibra estará sujeta en un extremo al soporte un motor que vibrará con una determinada amplitud (A) y una frecuencia (ω) y que en consecuencia hará oscilar la masa del modelo siguiendo la ecuación (5).

La frecuencia natural del sistema dependerá de la masa del modelo o sea de la porción de fibra monomodo del extremo si se considera esta zona cómo un cilindro de diámetro Dfo y largo Lfo. Aplicando la fórmula de la densidad se puede calcular la masa de la sección de fibra, si se conoce que la densidad de la gran mayoría de las fibras ópticas comerciales es de 2.203 g/cm3:

Si se aplica la fórmula para el volumen del cilindro, asumiendo que la altura es h es Lfo y el radio r es Dfo/2 se tiene que:
![]()
De esta forma es posible conocer la masa de cualquier porción de fibra a la que se le aplique este modelo de barra en voladizo.
Para aumentar la reflectividad de la punta de fibra para lograr una mayor señal en reflexión, se depositó plata en la punta de la estructura aplicando la técnica del bombardeo catódico [11,12]
Simulación y caracterización del sensor Taper como estructura en voladizo
Una vez construidas las estructuras Taper era necesario desarrollar un esquema que permitiera utilizar estas como sensor de vibraciones. Para ello se modeló el comportamiento del sensor en el programa ANSYS 10.0 utilizando varias longitudes de la sección de masa y de estrechado, lo que permitió aplicar varias configuraciones al Setup final, algunos de los modelos desarrollados pueden observarse en la figura 4.
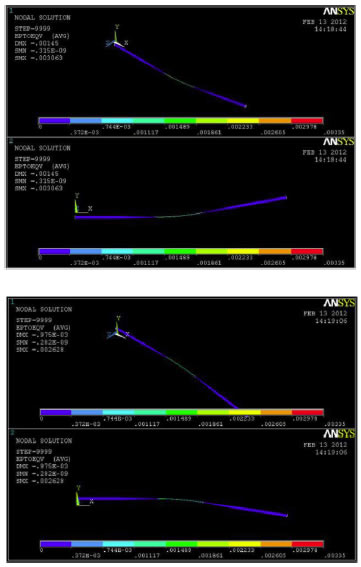
Figura 4: Simulación del modelo mecánico Cantiléver con el programa ANSYS 10.0 con dos momentos de deflexión para desplazamientos de opuestos.
Luego de modelar las estructuras se decidió desarrollar un Taper de 8mm de longitud en la zona final, lo que propiciaba una masa de aproximadamente 0.04 mg. La estructura se modeló y se logró simular el comportamiento de la amplitud de la vibración en función de la frecuencia, el pico de frecuencia natural se obtuvo a 103 Hz, la gráfica puede observarse en la figura 5.
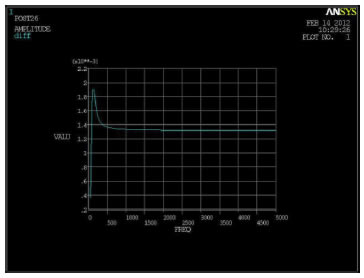
Figura 5: Simulación del comportamiento de la respuesta en amplitud del Taper en función del aumento en frecuencia.
Resultados y discusión
Con los datos obtenidos en el proceso de simulación se fabricó un sensor Taper utilizando una llama incidente en la Zona de estrechamiento, como se había expuesto anteriormente. Las dimensiones coinciden con los datos de simulación, es decir 8mm en la zona de la masa, con 0.4 mg, un diámetro de corte de 25 micras y una zona estrechada de 15 mm.
El Taper construido es colocado encima de un acelerómetro comercial para comparar ambas señales, figura 6.
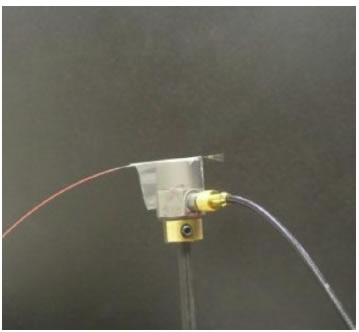
Figura 6: Sensor Taper colocado sobre el agitador electromagnético en el momento en que este está vibrando.
Para caracterizar el sensor se utilizó un Setup donde se colocó el Taper junto a un acelerómetro piezoeléctrico comercial Isotron modelo 256-100 con una sensibilidad de 99.66mV/g, como se mostró en la figura anterior, lo que permitió su análisis en función de la frecuencia y el desplazamiento. El sensor estaba alimentado por una fuente Láser de 1mW a 1310 nm, la señal óptica reflejada por la punta del Taper era detectada por un receptor óptico InGasAs 675RE Rifocs después de pasar por un acoplador 2X1 de Telnet. Para procesar y muestrear las señales de ambos sensores (señal del Taper y señal del acelerómetro), se utilizó un osciloscopio con un módulo de transformada rápida de Fourier (FFT). Las señales de vibración fueron obtenidas de un vibrador TIRA-TV-50018 controlado por un amplificador modelo TIRA-BAA 60. El Setup puede ser observado en la figura 7.
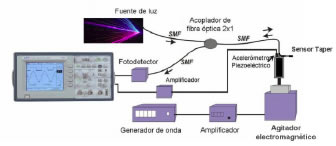
Figura 7: Setup desarrollado para la caracterización del sensor de vibraciones Taper.
Con este Setup se desarrollaron varias mediciones, primeramente se analizó el comportamiento del sensor Taper en función de la respuesta ante una agitación sinusoidal generada en el agitador electromagnético.
Caracterización en función del ángulo y del desplazamiento del sensor Taper
Para caracterizar el sensor Taper se varió su ángulo respecto a la horizontal utilizando un micropocisionador. Con esta prueba se logró determinar el rango de desplazamiento y los ángulos que puede medir linealmente el sensor Taper, las graficas relacionadas pueden observarse en las figuras 8a y 8b.
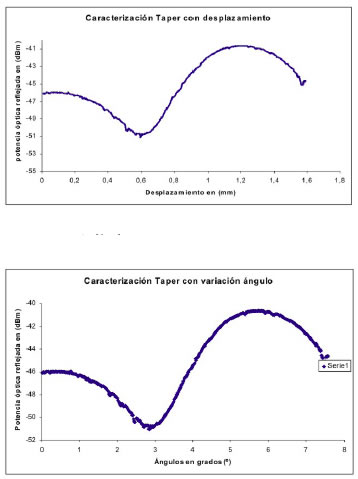
Figura 8(a): Variación de potencia óptica reflejada en función del desplazamiento.
Figura 8(b): Variación de potencia óptica reflejada en función del cambio de los ángulos respecto a la horizontal.
En este caso se observa una variación de aproximadamente 10 dBm en el rango de 0.8 mm a 1.1 mm y 3 a 6 grados de deformación respecto a la normal, lo que demuestra que el sensor presenta sensibilidad ante los cambios de posición de la estructura.
Con esta caracterización del sensor se desarrollaron un grupo de mediciones donde se analizó el comportamiento del mismo a diferentes frecuencias, comparando con la señal óptica obtenida del sensor Taper con la señal eléctrica del acelerómetro. Es importante hacer notar que a medida que se aumentaba la frecuencia se desfasaban las señales, esto es debido al retardo que introduce el modelo Cantiléver ante el incremento de la amplitud del desplazamiento [19,20], figuras 9a y 9b.
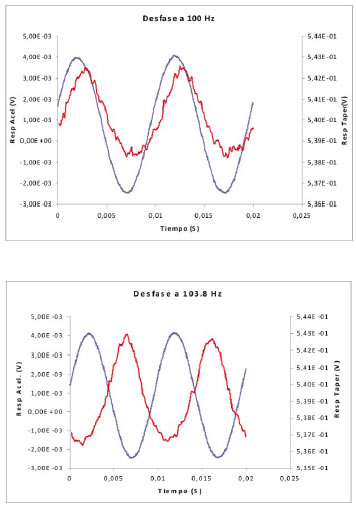
Figura9(a): Desfase entre el acelerómetro y el Taper a 100 Hz
Figura 9(b): Desfase entre el acelerómetro y el Taper a 103.8 Hz
En la figura 10 pueden observarse ambas señales directamente desde el osciloscopio. En la parte superior el generador de funciones muestra la frecuencia de la onda generada, para este caso 102.8 Hz. El desfase máximo coincide con la frecuencia natural de este modelo, corroborando la teoría anterior. EL ruido que se observa sobre las señales del sensor de fibra óptica son provocadas por las zonas de los conectores que introducen pequeñas variaciones de la señal por el efecto de interferometría propio de este tipo de dispositivos [4,5,10].
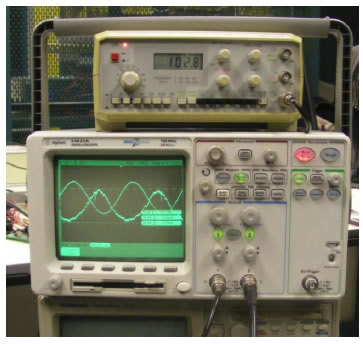
Figura 10: Desfase entre el acelerómetro y el Taper a 102.8 Hz mostrado directamente desde el osciloscopio.
Finalmente se decidió hacer las mediciones por debajo de estas frecuencias garantizando así una mejor estabilidad en respuesta del sensor, aunque el desfase no es un factor que puede generar errores en la medición siempre y cuando solo interese la medición de los valores de vibración en función de su frecuencia, amplitud o aceleración [13].
Medición de vibraciones en motores eléctricos utilizando el sensor Taper
Una vez caracterizado el sensor se procedió medir las vibraciones de un motor al cual provocó una vibración forzada a 55 Hz, el sensor se colocó sobre el motor utilizando el mismo Setup de la caracterización solo cambiando el agitador electromagnético por el motor en cuestión.
La vibración del motor puede observarse en la figura 11, la respuesta del sensor Taper está expresada en Voltios, se puede observar una amplitud pico a pico de 0,3 Voltios, la variación de la amplitud varía en función del error que provoca el movimiento vibratorio del motor, que en este caso no es constante, como se observa en la figura 11.
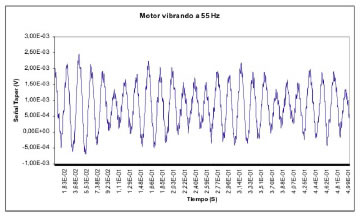
Figura 11: Señal de respuesta del Taper provocada por una vibración de 55 Hz en un motor eléctrico.
Otra medición realizada fue la referida a la respuesta del Taper a las variaciones bruscas de amplitud de la vibración, para ello se midió el comportamiento del motor en el momento del arranque, momento este que puede describirse a partir de la ecuación (7) [13,14].

Donde Tm es el par motor, Tr el par resistente, J es el momento de inercia del conjunto motor-maquina accionada y ω es la velocidad angular de dicho conjunto [12-14]. Las mediciones realizadas mostraron un cambio de amplitud de la vibración acorde con el momento de inercia del motor, la grafica puede observase en la figura 12.
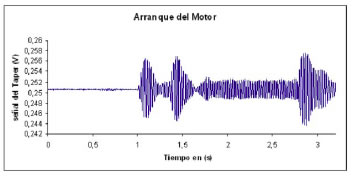
Figura 12: Señal de respuesta del Taper en el momento de arranque del motor.
La respuesta del sensor fue instantánea, en momento t=1.1s se ve el cambio de amplitud de la vibración inicial de motor. Es importante señalar que la naturaleza de la vibración, sea mecánica o eléctrica, puede variar el comportamiento del sensor en términos de amplitud y tiempo de respuesta [12,15,17,18].
Conclusiones
Los resultados obtenidos en este trabajo proporcionan una nueva herramienta para la detección de errores inducidos por vibraciones en maquinarias industriales a base de sensores de fibra estrechada. El estudio teórico del comportamiento de estas estructuras ópticas basadas en los principios físico-matemáticos de las fibras estrechadas, permitió determinar la utilidad de estos dispositivos para aplicaciones de medición de micro desplazamientos y vibraciones. Se comprobó de manera práctica que el sensor desarrollado presenta una respuesta lineal a diferentes intervalos de desplazamiento, lo permite la utilización del mismo dentro del rango de amplitudes y ángulos caracterizado. El mencionado estudio permitió la medición de vibraciones en motores eléctricos a diferentes frecuencias y en diferentes momentos de trabajo de manera práctica.
Agradecimientos
A todos los profesores de la Facultad de Eléctrica y Electrónica de la Universidad Pública de Navarra (España), en especial a los del Grupo de Sensores, que posibilitaron la realización de los experimentos de esta investigación en sus instalaciones. A los colegas de la Universidad de Pinar del Río que nos han apoyado en este intenso periodo de trabajo, a todos ellos, muchas gracias.
1. F.J. Arregui, I.R. Matías, C. Bariain and M. López-Amo, "Experimental design rules for implementing biconically Tapered singlemode optical fibre displacement sensors", European Workshop on Optical Fibre Sensors. Proceeding of SPIE Vol. 3483, (1998) 164-168 [ Links ]
2. F.J. Arregui, I.R. Matías and M. López-Amo "Optical fiber strain gauge based on a Tapered single-mode fiber", Sensors&Actuators: A. Physical, Vol. 79, pp. 90-96, 1999 [ Links ]
3. L.C. Bobb and P. M. Shankar, "Tapered Optical Fiber Components and Sensors", Microwave Journal, pp. 218- [ Links ]
4. C. Bariain, I.R. Matias, F.J.Arregui and M. Lopez-Amo, "Experimental results towards development of humidity sensors by using a hygroscopic material on biconically Tapered optical fiber", SPIE Proc. 3555, pp. 95-105, 1998 [ Links ]
5. S. Lacroix, R. Black, C. Veilleux, J. Lapierre, Tapered single-mod fibers: external refractive index dependence., Appl. Opt. 25 (15) 2468-2469. 1986 [ Links ]
6. L.C. Bobb, P.M. Shankar, H.D. Krumboltz, Bending effects in biconically tapered single-mode fibers, J. Lightw. Technol. 8 1084-1090. 1990 [ Links ]
7. J.W. Berthold et al. "Flight test results from FOCSI fiberoptic total pressure transducer", Proc. SPIE, 2295, 1994, pp. 216-222 [ Links ]
8. J.W. Berthold, "Hystorical review of microbend fiber optic sensors". Proc. of Spie Vol 2360, 10th Conference on Optical Fiber Sensors, 1994, pp. 182-186 [ Links ]
9. Y.W. Bibby, D.C. Larson, S.Tyagi and L.C. Bobb, "Fiber Optic Magnetic Field Sensors Using Metallic-Glass-Coated Optical Fibers", 8th Conference on Optical Fiber Sensors, OFS-8, pp. 161-164, 1991. [ Links ]
10. T. A. Birks, P. St. Russell and C. N. Pannel, "Low Power Acousto- Optic Device Based on a Tapered Single Mode Fiber", IEEE Phot. Tech. Let. 6, pp. 725-727, 1994. Proceedings J, Vol. 138, No. 5, pp. 355-364, 1991 [ Links ]
11. J. Goicoechea, "Recubrimientos nanométricos sobre sensores de fibra óptica," Tesis doctoral . Universidad Pública de Navarra. pp. 34-46. 2008. [ Links ]
12. P. Zhao, W. Su, R. Wang, X. Xu, F. Zhang, "Properties of thin silver films with different thickness," Physical E. Elsevier. Vol (35). 2008. [ Links ]
13. A. Siddique, G. S. Yadava, and B. Singh, "Effects of voltage unbalance on induction motors", Proc. IEEE Int. Symp. Electrical Insulation, pp. 26-29, 2004. [ Links ]
14. J. Faiz, H. Ebrahimpour, and P. Pillay, "Influence of unbalanced voltage on the steady-state performance of a tree phase squirrel-cage induction motor," IEEE Trans. Energy Convers., vol. 19(4), pp. 657-662, 2004. [ Links ]
15. W. H. Kersting and W. H. Phillips, "Phase frame analysis of the effects of voltage unbalance on induction machines," IEEE Trans. Ind. Appl., vol 33 (2), pp. 415-420, 1997. [ Links ]
16. S. P. Christmas, D. A. Jackson, P. J. Henderson et al., "Highresolution vibration measurements using wavelength demultiplexed fibre Fabry-Pérot sensors," Measurement Science and Technology, vol. 12, no. 7, pp. 901-905, 2001 [ Links ]
17. T.K. Gangopadhyay, "Measurement of vibrational amplitude using fibre-optic sensor, in: Proceedings of the International Conference on Fibre Optics and Photonics," Photonics-98, IIT, New-Delhi, India,14-18 , pp. 1113-1116. 1998. [ Links ]
18. Y. Rodríguez, J. M Corres, S. L Cabarrouy, J R.Vento "Desarrollo de arquitecturas interferométricas Fabry-Pérot. Sensado de vibraciones a través de in-line fiber etalon (ILFE),"Revista de Ciencias y Tecnología, Universidad Autónoma de Misiones, Argentina, (Cielo), No 12. 2010. [ Links ]
19. R. A. Collacott, "Vibration Monitoring and Diagnosis", John Wiley and Sons, 1979. [ Links ]
20. H Seidel, L Csepregi, "Design optimization for cantilevertype accelerometers", Sensor and actuator, 6 , 81-92, 1984. [ Links ]
Recibido: 30/11/2012
Aprobado: 25/02/2013

