










Servicios Personalizados
Revista

Articulo
 Inglés (pdf)
Inglés (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkRevista de la Unión Matemática Argentina
versión impresa ISSN 0041-6932versión On-line ISSN 1669-9637
Rev. Unión Mat. Argent. v.48 n.1 Bahía Blanca ene./jun. 2007
Harmonic Functions on the closed cube: an application to Learning Theory
O.R. Faure, J. Nanclares, and U. Rapallini
Presented by R. A. Macías
Abstract. A natural inference mechanism is presented: the Black Box problem is transformed into a Dirichlet problem on the closed cube. Then it is solved in closed polynomial form, together with a Mean-Value Theorem and a Maximum Principle. An algorithm for calculating the solution is suggested. A special feedforward neural net is deducted for each polynomial.
Key words and phrases. Dirichlet Problem, Diffusion Equation, Black Box, Convex Bodies
2000 Mathematics Subject Classification. 31-99, 52-99
One of the main questions facing the field of Artificial Intelligence is the following input/output problem:
Given a finite number  of instances or cases of a function as training data:
of instances or cases of a function as training data:
 |
infer, relying only on the given training data, unknown cases or instances of  , generalizing or predicting those yet unknown cases.
, generalizing or predicting those yet unknown cases.
For example, we are given cases of a binary function:
and we have to predict, say:

The problem may be restated as follows:
Given a binary function on a subset of the vertices of the  th dimensional unit cube, infer its values on the rest of the vertices. We must find a way of extending the given data without introducing extra information.
th dimensional unit cube, infer its values on the rest of the vertices. We must find a way of extending the given data without introducing extra information.
The flow of heat is a powerful process for flattening boundary values, losing information until a steady state is reached with a final minimum of potential energy and a maximum of entropy (in short, with all possible flatness).
Thus we may say heuristically that the information of the whole domain  with its boundary , the training data and the final harmonic function equals the information at the boundary when the process starts, the rest is a powerful flattening process ending in a function without local maxima or minima. Thus the process adds no information to the initial training data.
with its boundary , the training data and the final harmonic function equals the information at the boundary when the process starts, the rest is a powerful flattening process ending in a function without local maxima or minima. Thus the process adds no information to the initial training data.
Consider the  -dimensional temperature flow (heat equation):
-dimensional temperature flow (heat equation):
 |
such that on the vertices of the cube in  a function
a function  is given as an initial temperature distribution. We only fix
is given as an initial temperature distribution. We only fix  as given data at some vertices of the cube. If we let
as given data at some vertices of the cube. If we let  flow to the rest of the cube, always maintaining
flow to the rest of the cube, always maintaining  at the chosen vertices, and let
at the chosen vertices, and let  , once the steady sate (not equilibrium) is reached
, once the steady sate (not equilibrium) is reached  will take values on the whole cube and we may predict the values of
will take values on the whole cube and we may predict the values of  on all the vertices. The limit function will be harmonic. The most important property of the solution is this: the potential equation solves the following variational problem:
on all the vertices. The limit function will be harmonic. The most important property of the solution is this: the potential equation solves the following variational problem:
In a given physical system find the  function
function  on the
on the  unit cube compatible with the given data and with minimum potential energy:
unit cube compatible with the given data and with minimum potential energy:
 |
Definition 2.1. A P1P (Potential polynomial of degree 1 in each variable) will consist of a finite sum of monomials in the variables:
 |
such that each (real valued) variable has at most degree 1; all the coefficients also are real-valued.
The most general P1P with real-valued coefficients will have the form:

where all the sums run over all the different sub-indices  , and where no repeated sub-indices are allowed (there is no
, and where no repeated sub-indices are allowed (there is no  ). A special case is the purely boolean where the monomials are composed with variables
). A special case is the purely boolean where the monomials are composed with variables  or their boolean negations
or their boolean negations  and the coefficients may be 0 or.
and the coefficients may be 0 or.
Every well formed formula in the predicate calculus has a logical equivalent in this disjuntive normal form. P1Ps:
 |
are functions in the space  : their derivatives
: their derivatives
 |
also are P1Ps, independent of  , which implies that all second derivatives are zero, which makes P1Ps harmonic functions in
, which implies that all second derivatives are zero, which makes P1Ps harmonic functions in  .
.
Consider again the  -dimensional heat equation:
-dimensional heat equation:
 |
On the vertices of the cube in  a function
a function  is given as a fixed initial temperature distribution. Stepwise we may let it flow until the system converges to a steady state, keeping the initial data fixed, first to edges,once the edges attain a steady state which will be preserved, then to 2-dimensional facets, and so on until we have a temperature distribution on all the boundary such that it preserves the given data with un unceasing flow of heat at the initial vertices which preserves the initial information, and last allowing it to diffuse into the interior points of the
is given as a fixed initial temperature distribution. Stepwise we may let it flow until the system converges to a steady state, keeping the initial data fixed, first to edges,once the edges attain a steady state which will be preserved, then to 2-dimensional facets, and so on until we have a temperature distribution on all the boundary such that it preserves the given data with un unceasing flow of heat at the initial vertices which preserves the initial information, and last allowing it to diffuse into the interior points of the  -dimensional cube.
-dimensional cube.
The resulting function when  is the unique solution of Dirichlet's problem (see [1] and [4]): Keeping boundary data on some vertices fixed (it may be just 1 vertex) find in the whole cube the solution of Laplace's equation:
is the unique solution of Dirichlet's problem (see [1] and [4]): Keeping boundary data on some vertices fixed (it may be just 1 vertex) find in the whole cube the solution of Laplace's equation:
 |
This final steady state is not the state of equilibrium (see [9]). The flow of heat in order to sustain the boundary conditions keeps the system away from it.
We are given a finite number of instances or cases of a function  on a subset of the vertices of the cube in
on a subset of the vertices of the cube in  , and we are required to find
, and we are required to find  on all the cube and to express it as a P1P on the training data.
on all the cube and to express it as a P1P on the training data.
Let:
 |
be boolean variables, identified with m vertices of the  -dimensional cube, and let
-dimensional cube, and let
 |
the  given values of
given values of  as training data.
as training data.
Call  the convex hull of the
the convex hull of the  vertices.
vertices.
- Assign to the edge of two linked vertices a P1P consistent with the values of
 on the linked vertices. That is, assign 0 or 1 or some
on the linked vertices. That is, assign 0 or 1 or some  or some
or some  to the actual edge, according to the training data.
to the actual edge, according to the training data. - Proceed in the same way with all the facets of
 , stepwise on each and all dimensions of the boundary of
, stepwise on each and all dimensions of the boundary of  . In each case we are solving Laplace's equation with
. In each case we are solving Laplace's equation with  s on each boundary of each facet of
s on each boundary of each facet of  .
. - When all the boundary of
 has been modelled, again solve Laplace's equation, this last time in
has been modelled, again solve Laplace's equation, this last time in  dimensions, to get a unique harmonic function on
dimensions, to get a unique harmonic function on  , again a P1P in
, again a P1P in  variables.
variables. - The expression of the P1P thus obtained is automatically extended with identical expression, to all the cube (in fact to all
 ). If we assume there is data on a few points of the closed cube, then any continuous function defined at those points might grow to be a solution to Laplace's equation inside the cube (see [1]).
). If we assume there is data on a few points of the closed cube, then any continuous function defined at those points might grow to be a solution to Laplace's equation inside the cube (see [1]).
We get unicity through 'our' Dirichlet problem.
The following is our main result:
Theorem 2.1. There is only one solution  for our Dirichlet problem on the closed cube taking the
for our Dirichlet problem on the closed cube taking the  values on its vertices, which is harmonic on each & all the facets of the cube.
values on its vertices, which is harmonic on each & all the facets of the cube.
Proof. The case  is obvious. Consider a matrix
is obvious. Consider a matrix  of order
of order  whose rows stand for the different vertices of the cube, and whose columns are:
whose rows stand for the different vertices of the cube, and whose columns are:
 |
We choose the first row or vertex to be  , the case in which the variables are zero; and the first columnto be
, the case in which the variables are zero; and the first columnto be  corresponding to 1.
corresponding to 1.  is a matrix of order
is a matrix of order  . For example if
. For example if  we have
we have  is:
is:
 |
and  is:
is:
 |
We proceed to generate  : the columns are the previous ones plus the new ones:
: the columns are the previous ones plus the new ones:
![Xk+1 * [ 1,X1,...,X1X2 ...Xk ]](/img/revistas/ruma/v48n1/1a0877x.png) |
We may write:
 |
An elementary excercise in algebra gives us the result:

By the induction hypothesis the determinant of  is not zero, then the determinant of
is not zero, then the determinant of  is not zero.
is not zero.
The linear equations:
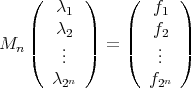 |
for any given  have exactly one solution; then:
have exactly one solution; then:
 |
is the unique solution to our Dirichlet problem on the closed  -dimensional unit cube. □
-dimensional unit cube. □
The potential energy of each function  is calculated from the variational formula:
is calculated from the variational formula:

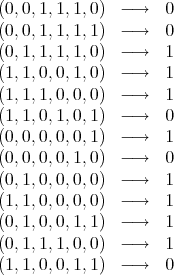
The following data are a modified form of a decision tree solving a 'tennis puzzle'(see [14], Chapter 2 ).
A Boolean function  is defined in 13 examples:
is defined in 13 examples:
We proceed to calculate a least squares linear fit to the data; all the 26 regressors are used. We find the P1P model:

as a fairly good representation of the function.
Warning: Our solution does not always end in a minimum description length P1P. If we are given :
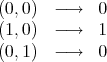
and we are asked to find the value corresponding to  :
:
The flow of heat will give us the chosen solution:

with the following model

with potential energy equal to  .
.
If instead  we put:
we put:

we get a potential energy equal to  and a model given by
and a model given by  But with:
But with:

we get a potential energy equal to  and a model given by
and a model given by  .
.
In other words: the solution model is the longest.
Again, given :
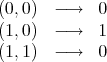
The flow of heat will give us:

with potential energy  and model given by
and model given by  .
.
If we put:

we get a potential energy equal to  and a model is
and a model is

If we put :

the potential energy is equal 1.416 and the model is  .
.
The first solution is chosen, and it is not the shortest one.
Every P1P has an equivalent neural net: Each variable  is an input neuron and the rest is an and/or scheme; the real coefficient of each monomial is the weight of the corresponding neuron. For example:
is an input neuron and the rest is an and/or scheme; the real coefficient of each monomial is the weight of the corresponding neuron. For example:
 |
may be directly interpreted as a neural net and as a NeuPro code. Weights are set to 1 and the threshold to  . The monomial will enter other neurons with a weight equal to its coefficient
. The monomial will enter other neurons with a weight equal to its coefficient  .
.
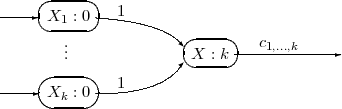
Figure 1. Monomial: 
On the other hand all the monomial neurons will be connected to neuron  with a threshold equal to
with a threshold equal to  .
.
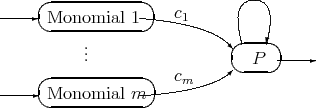
Figure 2. 
The weight of each monomial is its coefficient in the P1P. Consider as example:
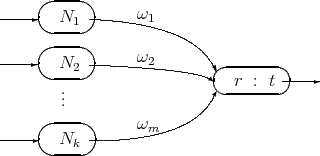
Figure 3.
It translates directly into the following NeuPro code (see [11]):

We started with an I/O situation from which we may infer the underlying function  expressing it as a P1P; then we obtain a 'natural' neural net representing
expressing it as a P1P; then we obtain a 'natural' neural net representing  and finally we translate mechanically the neural net into a NeuPro program.
and finally we translate mechanically the neural net into a NeuPro program.
- Assuming training data is given at a subset of the vertices of a unit
 cube we map the prediction problem into finding the solution of the heat equation in the whole cube.
cube we map the prediction problem into finding the solution of the heat equation in the whole cube. - Our inference machine is then the natural flow of temperature fixing the training data during the process in a typical Dissipative Structure. (See [9])
- The unique limit solution as
 is harmonic which means it is the function with minimum potential energy compatible with the given data.
is harmonic which means it is the function with minimum potential energy compatible with the given data. - The solution also has maximum Boltzmann's entropy:
where
 is the number of microstates (or complexions) in the actual physical final macrostate and
is the number of microstates (or complexions) in the actual physical final macrostate and  is Boltzmann's constant.
is Boltzmann's constant. - The P1P solution has an inmediate translation into a neural net and into a Neupro (or Prolog) code.
- We may translate Prolog code into P1P's obtaning a model of the code, a kind of 'self model'of the program. (See Appendix). This feature might be useful in the debugging process.
- The P1P solution is often, but not always, a Minimum Description Length object.
We map into our scheme a prolog program modelling the grandfather relation. Consider the program:
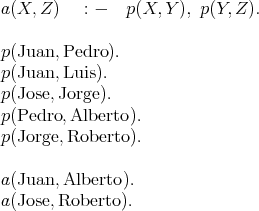
Its meaning: relation  holds between objects
holds between objects  and
and  if (
if ( ) relation
) relation  holds between objects
holds between objects  and
and  and (
and ( ) relation
) relation  holds between
holds between  and
and  .
.
We may code this information as follows: We assign predicates  and a with 1 and 0 respectively.
and a with 1 and 0 respectively.
We code the predicates as follows :

We find, as a fitted model for the underlyng theory with an error =  the following function:
the following function:
 |
Now we test this model for  trying the following examples:
trying the following examples:

We run the model for  and find :
and find :

in almost perfect agreement with the theory.
[1] Axler S., Bourdon P. & Ramey W. (2001) Harmonic Function Theory. Springer Verlag. [ Links ]
[2] Bundy A. (1983) The Computer Modelling of Mathematical Reasoning. Academic Press. [ Links ]
[3] Chaitin G. (1975) A theory of program size formally identical to Information Theory. Journal ACM Vol. 22 #3, 329-340. [ Links ]
[4] Courant R. & Hilbert D. (1953) Methods of Mathematical Physics. Interscience Publishers. [ Links ]
[5] Hand D., Mannila H. & Smyth P. (2001) Principles of Data Mining. MIT Press. [ Links ]
[6] Kelley J. (1955) General Topology. Van Nostrand University Series in Higher Mathematics. [ Links ]
[7] Kon M.A. & Plaskota L. (2000) Information Complexity of Neural Networks. Neural Networks. [ Links ]
[8] Mendelson E. (1964) Introduction to Mathematical Logic. Van Nostrand. [ Links ]
[9] Nicolis G. & Prigogine I. (1989) Exploring Complexity. Freeman & Co. [ Links ]
[10] Poggio T. & Girossi F. (1990) Regularization Algorithms for learning that are equivalent to multilayer Networks. Science # 247 pp. 978-982. [ Links ]
[11] Rapallini U. & Nanclares J. (2005) Intérprete NeuPro utilizando la NeuPro Abstract Machine. XI Congreso Argentino de Ciencias de la Computación. Concordia ER. [ Links ]
[12] Shannon C. (1949) A Mathematical Theory of Communication. University of Illinois Press. [ Links ]
[13] Sussman H. (1975) Semigroup Representations Bilinear Approximation of input/output maps and generalized inputs. Lecture Notes in Economics & Math. Systems. Mathematical Systems Theory 131, Springer Verlag. [ Links ]
[14] Mitchel T. (1997) Machine Learning. WCB McGraw Hill. [ Links ]
[15] Traub J.F. & Werschultz (1999) Complexity & Information. Cambridge University Press. [ Links ]
O. R. Faure
Facultad Regional Concepción del Uruguay,
Universidad Tecnológica Nacional,
Ing. Pereira 676,
E3264BTD Concepción del Uruguay (ER), Argentina
ofaure@frcu.utn.edu.ar
J. Nanclares
Facultad Regional Concepción del Uruguay,
Universidad Tecnológica Nacional,
Ing. Pereira 676,
E3264BTD Concepción del Uruguay (ER), Argentina
nanclarj@frcu.utn.edu.ar
U. Rapallini
Facultad Regional Concepción del Uruguay,
Universidad Tecnológica Nacional,
Ing. Pereira 676,
E3264BTD Concepción del Uruguay (ER), Argentina
rapa@frcu.utn.edu.ar
Recibido: 2 de octubre de 2007
Aceptado: 22 de octubre de 2007

