










Servicios Personalizados
Revista

Articulo
 Inglés (pdf)
Inglés (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkRevista de la Unión Matemática Argentina
versión impresa ISSN 0041-6932versión On-line ISSN 1669-9637
Rev. Unión Mat. Argent. v.48 n.3 Bahía Blanca 2007
Cluster categories and their relation to Cluster algebras, Semi-invariants and Homology of torsion free nilpotent groups
Gordana Todorov
Dedicated to María Inés Platzeck for her 60th birthday and Hector Merklen for his 70th birthday
Abstract. The structure of cluster categories [BMRRT] is well suited for the combinatorics of cluster algebras [FZ1] with the main correspondence being between tilting objects and clusters. Furthermore it was shown in [IOTW] that there is a close relation between domains of virtual semi-invariants and simplicial complexes associated to cluster categories. Also the same simplicial complexes associated to cluster categories are related to the Igusa-Orr pictures in the homology of nilpotent groups.
The purpose of this paper is to define and relate several, quite different notions, and therefore the paper is mostly a survey paper, including many results without proofs and also some indications about work in progress. With this in mind, the paper is divided in the following way.
In Section 1 we define and state main properties of cluster categories. The results are mostly from [BMRRT].
In Section 2, cluster algebras with no coefficients are defined (2.1) and several results about their relation to cluster categories are given . We consider only acyclic case; in (2.2) the main bijection theorem between cluster variables and indecomposable objects of the cluster category is stated; in (2.3) the denominators of nonpolynomial cluster variables are described in terms of dimension vectors of exceptional indecomposable representations; in (2.4) weak positivity condition of cluster variables is stated as a consequence of the quite technical proposition, and the proof of the bijection theorem is given. Also, Cluster determines seed conjecture is proved in 2.5.
Section 3 is mostly survey section, where we first recall definitions and theorems about classical semi-invariants, and then give definition and properties of virtual representation spaces and virtual semi-invariants. We only state the main theorems and for proofs refer to [IOTW].
Finally, Section 4 contains a short summary of the results about homology of nilpotent groups and the relation to the simplicial complex of tilting object in the corresponding cluster category.
1.1. A motivation. The categories of finitely generated modules over hereditary artin algebras, together with their derived categories, are very well understood. Since there were clear indications (e.g.[FZ1]) that there was close relation between the indecomposable modules and cluster variables of the cluster algebras, at least in the finite representation type, via root systems, it was quite natural to study and develop the theory of certain orbit categories of the derived categories which perfectly reflect the combinatorics of cluster algebras.
1.2. Derived category. We recall the standard definitions and notation: Let  be a quiver with
be a quiver with  vertices and no oriented cycles and
vertices and no oriented cycles and  a field. Then
a field. Then  , the associated path algebra is hereditary. Let
, the associated path algebra is hereditary. Let  be the category of finitely generated
be the category of finitely generated  -modules, and
-modules, and  the derived category of bounded complexes in mod
the derived category of bounded complexes in mod . Since
. Since  is hereditary the derived category is easy to describe: the objects in
is hereditary the derived category is easy to describe: the objects in  are finite direct sums of the objects in
are finite direct sums of the objects in ![∪ {(mod Λ [i])} i](/img/revistas/ruma/v48n3/3a0210x.png) and the morphisams in
and the morphisams in  can be described in the following way:
can be described in the following way:
 for
for  in
in  ,
,
![1 HomDb (M, N [1]) = Ext Λ(M, N )](/img/revistas/ruma/v48n3/3a0215x.png) for
for  in
in  ,
,
![HomDb (M, N [i]) = 0](/img/revistas/ruma/v48n3/3a0218x.png) for
for  in
in  and all
and all 
![HomDb (X [i],Y[i]) = HomDb (X, Y )](/img/revistas/ruma/v48n3/3a0222x.png) for
for  in
in  and all
and all  .
.
1.3. Cluster category. In order to define the corresponding cluster category, we consider the endofunctor: ![-1 - 1 b b F = τ [1] = [1]τ : D → D ,](/img/revistas/ruma/v48n3/3a0226x.png) where
where ![b b [1] : D → D](/img/revistas/ruma/v48n3/3a0227x.png) is the suspension functor, and
is the suspension functor, and  is the Auslander-Reiten functor. Then, the cluster category
is the Auslander-Reiten functor. Then, the cluster category  is defined to be the orbit category, i.e. the objects in
is defined to be the orbit category, i.e. the objects in  are
are  -orbits, and the morphisams in
-orbits, and the morphisams in  are
are  , where
, where  and
and  are
are  -orbits of
-orbits of  and
and  .
.
From the above definition it is easy to see that a set of representatives of the orbits may be chosen in ![add(ind Λ ∪ {Pi[1]}ni=1)](/img/revistas/ruma/v48n3/3a0239x.png) . Often we will use the same symbol for the objects in
. Often we will use the same symbol for the objects in  and their orbits in
and their orbits in  .
.
1.4. An example. Let  be the Dynkin diagram of type
be the Dynkin diagram of type  with the following orientation and labeling of the vertices:
with the following orientation and labeling of the vertices:  . Let
. Let  be the non isomorphic simple
be the non isomorphic simple  representations, or simple
representations, or simple  -modules, let
-modules, let  be the nonisomorphic indecomposable projective
be the nonisomorphic indecomposable projective  representations (
representations ( -modules), and let
-modules), and let  be the nonisomorphic indecomposable injective
be the nonisomorphic indecomposable injective  representations (
representations ( -modules). Consider the Auslander-Reiten quiver of mod
-modules). Consider the Auslander-Reiten quiver of mod and
and  :
:
![S3[- 1] P3 P1 [1 ] S2 [1] S3[1] P3[2] \\ // \\ // P2 I2 P2[1] I2[1] P2 [2] // \\ // \\ // P1 S2 S3 P3 [1] P1[2] S2[2]](/img/revistas/ruma/v48n3/3a0256x.png)
A set of representatives for the  -orbits may be chosen to be the following 9 objects:
-orbits may be chosen to be the following 9 objects: ![{P1,P2, P3,S2,I2,S3, P1[1 ],P2 [1],P3[1]}.](/img/revistas/ruma/v48n3/3a0258x.png)
1.5. Tilting objects. Tilting objects are defined in a similar way as tilting modules. First we define ![∐ ∐ Ext1C ( ˜X, ˜Y ) := iExt1Db(X, F iY ) = iHomDb (X, F iY [1]) Λ](/img/revistas/ruma/v48n3/3a0259x.png) . Then, we define
. Then, we define  to be an exceptional object in
to be an exceptional object in  if
if  . Define a tilting object (basic) to be a maximal exceptional object in
. Define a tilting object (basic) to be a maximal exceptional object in  without multiplicities. As stated in 1.3 we will usually use the same symbol for the objects in
without multiplicities. As stated in 1.3 we will usually use the same symbol for the objects in  and their orbits in
and their orbits in  .
.
1.6. Tilting seeds. The notion of tilting seed is introduced for the sake of setting up a good correspondence between "cluster category" terminology and "cluster algebra" terminology, in order to be able to write rigorous proofs. A tilting seed is defined to be a pair  , where
, where  is a basic tilting object and
is a basic tilting object and  is the quiver of
is the quiver of  . Notice that the tilting object
. Notice that the tilting object  determines the quiver
determines the quiver  .
.
1.7. Exchange pairs. The following theorems give precise conditions when an indecomposable summand of a tilting object can be replaced by another indecomposable object, i.e. they "can be exchanged".
Theorem 1.7.1. [BMRRT] Let  be a basic tilting object with
be a basic tilting object with  indecomposable. Then, there exists exactly one object
indecomposable. Then, there exists exactly one object  not isomorphic to
not isomorphic to  , such that
, such that  is also a basic tilting object.
is also a basic tilting object.
Definition 1.7.2. Using the notation from Theorem 1.7.1 we call the indecomposable objects  and
and  an exchange pair with respect to
an exchange pair with respect to  (or
(or  ).
).
Theorem 1.7.3. [BMRRT] Two exceptional indecomposable objects  and
and  form an exchange pair if and only if
form an exchange pair if and only if  , where
, where  and
and  .
.
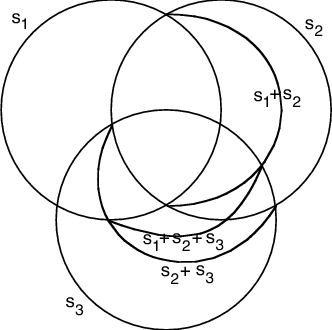
1.8. Tilting objects in the cluster category for  . We will use the same example and the same notation as in 1.4. In the following figure the vertices are labeled by representatives of indecomposable objects in the cluster category. Vertices are connected by a line segment if there are no extensions between the two corresponding objects. Consequently, each small triangle defines a tilting object and all tilting objects are given that way. There are 14 tilting objects in this example, e.g.
. We will use the same example and the same notation as in 1.4. In the following figure the vertices are labeled by representatives of indecomposable objects in the cluster category. Vertices are connected by a line segment if there are no extensions between the two corresponding objects. Consequently, each small triangle defines a tilting object and all tilting objects are given that way. There are 14 tilting objects in this example, e.g.  ,
,  ,
, ![∐ ∐ (S1 [1] S2 P3 [1])](/img/revistas/ruma/v48n3/3a0289x.png) ,
, ![∐ ∐ (S1[1] P2[1] P3 [1])](/img/revistas/ruma/v48n3/3a0290x.png) etc.
etc.
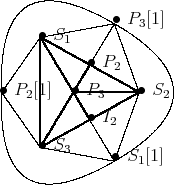
Figure 1. Tilting objects in the cluster category of 
1.9. Tilting mutations. Throughout the paper we will use 3 different ways to express the situation from the Theorem 1.7.1:
- Tilting mutation of an indecomposable object
 is
is  , with respect to
, with respect to  :
:  e.g.
e.g.  with respect to the tilting object
with respect to the tilting object  .
. - Tilting mutation of the tilting object
 at
at  is
is  :
:  e.g.
e.g.  .
. - Tilting mutation of the tilting seed
 at
at  is the new seed
is the new seed  :
: 
e.g.
 , with the extra information that
, with the extra information that  and
and  .
.
All examples refer to the cluster category in 1.8.
1.10. A construction of exchange pairs, i.e. tilting mutation. This construction uses the notion of minimal right approximation by a subcategory. Let  be a tilting object, where
be a tilting object, where  is an indecomposable summand. Let
is an indecomposable summand. Let  be a minimal right
be a minimal right  -approximation of
-approximation of  . This approximation exists, since
. This approximation exists, since  is additively generated by a finitely generated module
is additively generated by a finitely generated module  . Let
. Let

 .
. 1.11. Some facts about exchange pairs. Here we state some of the facts (without proofs) and draw the commutative diagrams from [BMRRT].
 is indecomposable and exceptional,
is indecomposable and exceptional, is a minimal left
is a minimal left  - approximation of
- approximation of  ,
, ,
, and
and  form an exchange pair with respect to
form an exchange pair with respect to  (or
(or  ).
).- Consider the AR-triangle for
 :
: 
![∐ | Kh Lh[- 1] | ----- M * --- AM * --τ-1M * ----- =| | | g f h ----- M * -----B ----- M| ------ g′ ′ B| ′ f τ- 1M *[1 ] = F M * ~=CΛ M *.](/img/revistas/ruma/v48n3/3a02131x.png)
 ,
,![∐ ∐ B ′ = Coker (h) Ker (h)[1] := Lh Kh [1]](/img/revistas/ruma/v48n3/3a02133x.png) ,
, is an isomorphism if and only if
is an isomorphism if and only if  ,
, if and only if
if and only if  is AR triangle if and only if
is AR triangle if and only if  .
.- The vertical maps
 and
and  are left and right
are left and right  -approximations of
-approximations of  and
and  (respec).
(respec). - By considering AR triangle for
 we get a similar commutative diagram.
we get a similar commutative diagram.
2. Cluster Algebras and Cluster Categories
In this section we want to indicate what correspondences exist between the categorical notions of cluster categories and combinatorial notions of cluster algebras.
Cluster algebras were defined by Fomin and Zelevinsky, in general with coefficients, however cluster categories are set to deal only with the cluster algebras without coefficients, so we will recall the definition of cluster algebras only in that case. We also point out that the "sign skew symmetrizable square matrices" correspond to valued quivers, with valuations on arrows being precisely the integer values of the entries of the corresponding matrix.
2.1. Cluster algebras; Definitions.
Cluster algebra  is a subalgebra of the field of rational functions
is a subalgebra of the field of rational functions  , which is generated as algebra by cluster variables; cluster variables are defined to be all rational functions which appear in a certain collection of transcendence bases, called clusters; clusters are transcendence bases in
, which is generated as algebra by cluster variables; cluster variables are defined to be all rational functions which appear in a certain collection of transcendence bases, called clusters; clusters are transcendence bases in  which are obtained from an initial cluster after applying sequences of "cluster mutations" in every possible direction, but according to the rules prescribed by the matrices
which are obtained from an initial cluster after applying sequences of "cluster mutations" in every possible direction, but according to the rules prescribed by the matrices  , (or equivalently, quivers
, (or equivalently, quivers  ) as we will describe in 2.1.1.
) as we will describe in 2.1.1.
We point out that at every stage of cluster mutations, there is a new pair formed  , called a cluster seed, where
, called a cluster seed, where  is the new cluster and
is the new cluster and  is the new quiver. Initial cluster seed is a pair
is the new quiver. Initial cluster seed is a pair  , where
, where  is a transcendence basis, called initial cluster and
is a transcendence basis, called initial cluster and  is the initial quiver (a matrix
is the initial quiver (a matrix  ).
).
Definition 2.1.1. Using the notation from above we now define cluster mutations (again, the same mutation expressed in 3 ways as in 1.9):
- Cluster mutation of
 with respect to the cluster seed
with respect to the cluster seed  is the new cluster variable
is the new cluster variable  obtained as
obtained as  .
. Notation
 .
. - Cluster mutation of the cluster
 at
at  is a new cluster
is a new cluster 
Notation:

- Cluster mutation of the cluster seed
 at
at  is the new cluster seed
is the new cluster seed  .
. Notation:
 , where
, where  new quiver obtained in quite a complicated way (see [FZ1]).
new quiver obtained in quite a complicated way (see [FZ1]).
In general, this process of creating new cluster variables will never stop, however there is a precise classification of cluster algebras which have only finitely many cluster variables, as stated in the following theorem.
Theorem 2.1.2. [FZ2] A cluster algebra has finitely many cluster varibles, if and only if a Dynkin diagram appears as one of the quivers in the mutation process.
Starting with a fixed quiver  (no oriented cycles), one obtains a cluster algebra
(no oriented cycles), one obtains a cluster algebra  , with all of its notions: cluster seeds, clusters, cluster variables, cluster mutations. From the same quiver one can construct cluster category
, with all of its notions: cluster seeds, clusters, cluster variables, cluster mutations. From the same quiver one can construct cluster category  , with the tilting seeds, tilting object, indecomposable objects and tilting mutations. The following table contains main "cluster algebra" and "cluster category" notions, NOT as a theorem, but just to indicate where the correspondences should be. However, the theorems are stated afterwards.
, with the tilting seeds, tilting object, indecomposable objects and tilting mutations. The following table contains main "cluster algebra" and "cluster category" notions, NOT as a theorem, but just to indicate where the correspondences should be. However, the theorems are stated afterwards.
 quiver
quiver  -cluster algebra -cluster algebra | -- |  -cluster category, where -cluster category, where  |
 -initial cluster seed -initial cluster seed | -- | ![∐ ∐ (P1 [1 ] ⋅⋅ ⋅ Pn [1],Q )](/img/revistas/ruma/v48n3/3a02180x.png) -initial tilting seed -initial tilting seed |
 -any cluster seed -any cluster seed | -- |  -any tilting seed -any tilting seed |
 -any cluster -any cluster | -- |  -any basic tilting object -any basic tilting object |
 -any cluster variable -any cluster variable | -- |  -any indecomposable exceptional object -any indecomposable exceptional object |
Theorem 2.2.1. [FZ1], [MRZ] Suppose  is a Dynkin diagram. Then there exists a one-to-one correspondence
is a Dynkin diagram. Then there exists a one-to-one correspondence
 cluster variables
cluster variables isoclasses of indecomposable objects
isoclasses of indecomposable objects  .
.
Theorem 2.2.2. [BMRRT] Suppose  is a simply laced Dynkin diagram. Then there exist one to one correspondences (the second one being induced by the first):
is a simply laced Dynkin diagram. Then there exist one to one correspondences (the second one being induced by the first):
 cluster variables
cluster variables isoclasses of indecomposable objects
isoclasses of indecomposable objects ,
,
{clusters} {basic tilting objects}.
{basic tilting objects}.
It was conjectured in the same paper that similar one-to-one correspondences exist between cluster variables and exceptional indecomposable objects for all simply laced diagrams with no oriented cycles. The proof of this follows from the existence of two particular surjective maps, which are inverse bijections:
 ,
,
 .
.
The map  is the Caldero-Chapoton map from [CK2], and the existence of map
is the Caldero-Chapoton map from [CK2], and the existence of map  is given in the following theorem.
is given in the following theorem.
Theorem 2.2.3. [BMRT] Let  be simply laced diagram with no oriented cycles.
be simply laced diagram with no oriented cycles.
(a) There exist well defined maps:
 cluster variables
cluster variables isoclasses of indecomp. exceptional objects},
isoclasses of indecomp. exceptional objects},
 clusters
clusters tilting objects},
tilting objects},
 cluster seeds
cluster seeds tilting seeds}.
tilting seeds}.
(b) All three maps:  are onto.
are onto.
We will indicate main steps of the proof of the above theorem, since they include several other interesting results about the denominators of the cluster variables 2.3.4, weak positivity condition 2.4.6 and proof of the Fomin-Zelevinsky conjecture that cluster determines the entire cluster seed after cluster mutations 2.5.1.
Theorem 2.2.4. Bijection ([CK2],[BMRT]) Let  be simply laced diagram with no oriented cycles. Then there exist a bijection between cluster variables and exceptional indecomposable objects, inducing a bijection between clusters and tilting objects.
be simply laced diagram with no oriented cycles. Then there exist a bijection between cluster variables and exceptional indecomposable objects, inducing a bijection between clusters and tilting objects.
An illustration on  . We illustrate the above correspondence by using the same Figure 1 as we did for the objects, tilting objects and exchange pairs of the cluster category, but label the vertices now by the corresponding cluster variables.
. We illustrate the above correspondence by using the same Figure 1 as we did for the objects, tilting objects and exchange pairs of the cluster category, but label the vertices now by the corresponding cluster variables.
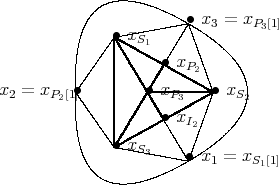
Figure 2. Clusters in the cluster algebra of 
- Vertices are labeled by cluster variables and cluster variables are labeled by the corresponding representatives of indecomposable objects in the cluster category.
- Vertices are connected by a line if the compatibility degree between the cluster variables is 0 which corresponds to no extensions between the corresponding two objects.
- Each small triangle defines a cluster and a basic tilting object.
- All clusters and all tilting objects are given that way.
- There are 14 clusters and 14 basic tilting objects in this example.
- The initial cluster
 is chosen in such a way, that the denominators of all other cluster variables are given by the dimension vectors of the corresponding
is chosen in such a way, that the denominators of all other cluster variables are given by the dimension vectors of the corresponding  -modules (see theorems in next section).
-modules (see theorems in next section).
2.3. Denominators of cluster variables.
From this section, we only need notation, and the famous "Laurent phenomenon" theorem of Fomin and Zelevinsky. However we will also state known results about the monomials which appear in the denominators of the cluster variables.
Theorem 2.3.1. [FZ1] (Laurent phenomenon) The denominators of all cluster variables, when expressed in terms of the initial cluster, and then reduced, are monomials.
Notation: Let  be a monomial in variables
be a monomial in variables  . Denote the exponent vector by
. Denote the exponent vector by  .
.
Theorem 2.3.2. [FZ1] Let  be a Dynkin diagram with alternating orientation. For each cluster variable in reduced form
be a Dynkin diagram with alternating orientation. For each cluster variable in reduced form  , there is an indecomposable module
, there is an indecomposable module  , such that
, such that 
Theorem 2.3.3. [CCS2] Let  be any Dynkin diagram. For each cluster variable in reduced form
be any Dynkin diagram. For each cluster variable in reduced form  , there is an indecomposable module
, there is an indecomposable module  , such that
, such that  (Also [RT] and [CK1] have the same result.)
(Also [RT] and [CK1] have the same result.)
Theorem 2.3.4. [BMRT] Let  be any finite simply laced diagram with no oriented cycles. For each cluster variable in reduced form
be any finite simply laced diagram with no oriented cycles. For each cluster variable in reduced form  , there is an indecomposable exceptional module
, there is an indecomposable exceptional module  , such that
, such that 
Proof. This follows from 2.4.6. □
2.4. Weak Positivity Condition and Conditions ( ,
,  ,
,  ).
).
These are essential notions for the proofs of the existence of the maps  ,
,  ,
,  , i.e. that the objects
, i.e. that the objects  ,
,  ,
,  satisfy the desired conditions:
satisfy the desired conditions:  is an indecomposable exceptional object,
is an indecomposable exceptional object,  is a tilting object and
is a tilting object and  is a tilting seed.
is a tilting seed.
Definition 2.4.1. A polynomial  in variables
in variables  is said to satisfy the weak positivity condition if
is said to satisfy the weak positivity condition if  for all
for all  , where
, where  is at the
is at the  -th place.
-th place.
Remark: If  satisfies the weak positivity condition, then
satisfies the weak positivity condition, then  does not have any non-constant monomial factors.
does not have any non-constant monomial factors.
Definition 2.4.2. Let  be an initial cluster for a cluster algebra given by a quiver
be an initial cluster for a cluster algebra given by a quiver  . A cluster variable
. A cluster variable  is said to satisfy
is said to satisfy  if:
if:
- either
 or
or  , where
, where  is a polynomial in
is a polynomial in  and it satisfies positivity condition and
and it satisfies positivity condition and - if
 , then there exists an indecomposable exceptional
, then there exists an indecomposable exceptional  -module
-module  , such that
, such that  .
.
Definition 2.4.3. If a cluster variable  satisfies condition (
satisfies condition ( ), we (can) define:
), we (can) define:
![{ M if x = f∕m and ε(m ) = dimM α(x) := Pi[1 ] if x = fxi.](/img/revistas/ruma/v48n3/3a02269x.png)
Remark: We want to define  on all cluster variables. So far, we defined only on cluster variables satisfying (
on all cluster variables. So far, we defined only on cluster variables satisfying ( ). So, we will prove that ALL cluster variables satisfy condition (
). So, we will prove that ALL cluster variables satisfy condition ( ) if the cluster algebra is acyclic with no coefficients.
) if the cluster algebra is acyclic with no coefficients.
This will be proved after the Proposition 2.4.4 and Corollary 2.4.6, however the proof involves clusters and cluster seeds as well. The corresponding conditions on clusters and cluster seeds will be denoted by: ( ),(
),( ) and we define them now.
) and we define them now.
Properties: ( ), (
), ( ), (
), ( ) Definitions and properties.
) Definitions and properties.
( ) is a property of a cluster variable
) is a property of a cluster variable  consisting of two parts:
consisting of two parts:
 or
or  , where
, where  satisfies positivity condition, and
satisfies positivity condition, and , for some indecomposable exceptional module
, for some indecomposable exceptional module  .
. Notice: If
 satisfies (
satisfies ( ), then
), then  is defined (i.e. it is an indecomposable exceptional object)(as in 2.4.2 and 2.4.3).
is defined (i.e. it is an indecomposable exceptional object)(as in 2.4.2 and 2.4.3).
( ) is a property of a cluster
) is a property of a cluster  consisting of two parts:
consisting of two parts:
- each cluster variable
 satisfies (
satisfies ( ), and
), and  is a tilting object.
is a tilting object. Notice: If
 satisfies (
satisfies ( ), then
), then  can be defined as
can be defined as , which is a tilting object.
, which is a tilting object.
( ) is a property of a cluster seed
) is a property of a cluster seed  consisting of two parts:
consisting of two parts:
- the cluster
 satisfies (
satisfies ( ), and
), and  .
. Notice: If
 satisfies (
satisfies ( ), then
), then  can be defined as
can be defined as which is a tilting seed.
which is a tilting seed.
Proposition 2.4.4. Let  be a cluster seed satisfying (
be a cluster seed satisfying ( ). Consider a cluster mutation. Then:
). Consider a cluster mutation. Then:
-
 :
:- The new cluster variable satisfies (
 ).
).  :
:- The new cluster satisfies (
 ).
).  :
:- The new cluster seed satisfies (
 ).
).
-
 :
: commutes with mutations, i.e.
commutes with mutations, i.e.  .
. :
: commutes with mutations, i.e.
commutes with mutations, i.e.  .
. :
: commutes with mutations, i.e.
commutes with mutations, i.e.  .
.
Proof. We need to set up a bit more detailed and precise notation.
Let  be a cluster seed, where
be a cluster seed, where  is a cluster.
is a cluster.
Let  be a cluster mutation at
be a cluster mutation at  .
.
Since  satisfies (
satisfies ( ), there exists an object
), there exists an object  such that
such that  .
.
Denote  by
by  .
.
Let  be the new cluster variable defined via cluster mutation
be the new cluster variable defined via cluster mutation  .
.
Then 
 .
.
Proof of a: WTS  satisfies (
satisfies ( ). Let
). Let  .
.
It is a tilting object since  satisfies (
satisfies ( ).
).
Consider tilting mutation of  at
at  , i.e. exchange
, i.e. exchange  with another object
with another object  .
.
Then  is the new tilting object.
is the new tilting object.
Let  and
and  be the exchange triangles.
be the exchange triangles.
Notation and results from ([BMR2], 6.2) imply:
 if
if  and
and  .
.
At this point we brake the proof into several parts, depending on whether the representatives of  and
and  are modules or shifted projectives.
are modules or shifted projectives.
Case I: Both  and
and  are modules.
are modules.
- Step 1:
 is an exact sequence of modules.
is an exact sequence of modules.- Step 2:
- Describe
 , i.e. representatives of the summands of
, i.e. representatives of the summands of  in the fundamental domain add(ind
in the fundamental domain add(ind![n Λ ∪ {Pi [1]}i=1)](/img/revistas/ruma/v48n3/3a02365x.png) . Consider the following commutative diagram, together with the AR-triangles as mentioned at the beginning:
. Consider the following commutative diagram, together with the AR-triangles as mentioned at the beginning: ![∐ | Kh Lh [- 1] | | | | 0 | | // ∐ -1 */ Kg Lg[- 1 ] τ M | // | | AM * h 0 | / | | // ---- * /--- ----- /---- 0 M | B| M| 0 / // | // | 0 g | A τM | | // | ′ ∐ τM| B = Kh [1] Lh / // | | 0 | | | | τ- 1M *[1] = F M *](/img/revistas/ruma/v48n3/3a02366x.png)
 implies
implies  and
and 
![∐ ∐ τ-1(Kg Lg[- 1])[1] ~= b (Kh [1] Lh) D](/img/revistas/ruma/v48n3/3a02370x.png)
Let
 with
with  injective and
injective and  with no injective summands.
with no injective summands.Let
 with
with  projective and
projective and  with no projective summands.
with no projective summands.![∐ ∐ ∐ ∐ τ-1Kg [1] τ- 1I τ-1Z ~=Db (Lh P [1] Y [1])](/img/revistas/ruma/v48n3/3a02377x.png)
By comparing shifts of nonprojectives, shifts of projectives and actual modules, get the following isomorphisms in the derived category:
![-1 ~ τ Kg [1]=Db (Y [1])](/img/revistas/ruma/v48n3/3a02378x.png) ,
, ![-1 ~ P (SocI )[1] = τ I =Db P[1]](/img/revistas/ruma/v48n3/3a02379x.png) ,
, 
![τ-1Kg [1] ~= (Y [1]) Db](/img/revistas/ruma/v48n3/3a02381x.png) implies
implies ![F Kg ~= (Y [1]) Db](/img/revistas/ruma/v48n3/3a02382x.png) and so
and so ![~ Kg =C (Y [1])](/img/revistas/ruma/v48n3/3a02383x.png)
Finally:
![′ ~ ∐ ∐ B =C (Lh Kg P [1])](/img/revistas/ruma/v48n3/3a02384x.png)
- Step 3:
- All
 ,
,  ,
,  satisfy condition (
satisfy condition ( ) by assumption.
) by assumption.  ,
,  ,
,  ,
,  ,
,![xP[1] = (c(P∕rP )fP [1])](/img/revistas/ruma/v48n3/3a02393x.png) where
where 
 ,
,  ,
,  ,
,  ,
, ![fP [1]](/img/revistas/ruma/v48n3/3a02399x.png) satisfy positivity condition
satisfy positivity condition ,
,  ,
,  ,
,  .
. - Step 4:
 or
or  Reason:
Reason: 
- Step 5:
- Compute

![(f +f ⋅f ⋅m′⋅c ⋅f )(1∕f ) (xM )* = (xB(+xxMB)′)-= --B--Kg-Lh-(mB-(∕Pm∕rMP))-P[1]---M-](/img/revistas/ruma/v48n3/3a02408x.png)
- Step 6:
 satisfies condition (
satisfies condition ( ). Reason:
). Reason:  divides the rest of the numerator (Laurent phenomenon).
divides the rest of the numerator (Laurent phenomenon).Numerator is a polynomial which satisfies positivity condition.
Numerator does not have any non-constant monomial factors.
Denominator is monomial
 , with
, with 
 is an indecomposable exceptional module.
is an indecomposable exceptional module.- Step 7:
 This is exactly the statement that
This is exactly the statement that  commutes with mutations, i.e. 2)a of the proposition.
commutes with mutations, i.e. 2)a of the proposition.
Case II:  is not a module, i.e.
is not a module, i.e. ![M = P [1]](/img/revistas/ruma/v48n3/3a02418x.png) .
.
First, we point out that in this case  must be a module, since
must be a module, since  . We will just set up the exchange triangles and commutative diagrams, and the rest is similar kind of analysis, but somewhat more complicated.
. We will just set up the exchange triangles and commutative diagrams, and the rest is similar kind of analysis, but somewhat more complicated.
![M = P [1]](/img/revistas/ruma/v48n3/3a02421x.png) implies that
implies that ![∐ B = C P ′[1]](/img/revistas/ruma/v48n3/3a02422x.png) , with
, with  non-projective and
non-projective and  projective.
projective.
![M *[1 ] ~= P ∕P ′[1]](/img/revistas/ruma/v48n3/3a02425x.png) since
since ![dim Hom (M, M *[1]) = 1](/img/revistas/ruma/v48n3/3a02426x.png)
![| | | | | | | | | | // | / / ′ -1 ′ B | τ (P|∕P ) | // | | / | | AP∕P′ |h / | // | | / / ′/ ∐ ′ / ′ P ------P ∕P -- C P [1] -- P [1 ]-- (P ∕P )[1] // | | // | / / | | / | g | AI | | // | |/ / | I B ′ // | | / / | | / | | | | | | | τ- 1(P ∕P ′)[1] = F(P ∕P ′)](/img/revistas/ruma/v48n3/3a02427x.png)
Case III:  a module,
a module, ![* M = P [1 ]](/img/revistas/ruma/v48n3/3a02429x.png) . Similar to the previous case.
. Similar to the previous case.
This finishes the proof of  the new cluster variable
the new cluster variable  satisfies condition (
satisfies condition ( ) and also
) and also  .
.
Proof of  The new cluster
The new cluster  satisfies (
satisfies ( ).
).
- Each cluster variable
 satisfies (
satisfies ( ) condition by assumption and part
) condition by assumption and part  .
.  is a tilting object.
is a tilting object.
Proof of  The new cluster seed
The new cluster seed  satisfies (
satisfies ( ).
).
- The new cluster
 satisfies (
satisfies ( ) by
) by  .
. - The quiver of
 is equal to
is equal to  by [BMR].
by [BMR].
This finishes the proof of the proposition. □
Corollary 2.4.5. Let  be a cluster seed satisfying condition (
be a cluster seed satisfying condition ( ). Let
). Let  be a cluster mutation and
be a cluster mutation and  the corresponding tilting mutation. Then:
the corresponding tilting mutation. Then:  .
.
Corollary 2.4.6. Every cluster seed satisfies ( ), every cluster satisfies (
), every cluster satisfies ( ) and every cluster variable satisfies (
) and every cluster variable satisfies ( ). In particular, every cluster variable is either of the form
). In particular, every cluster variable is either of the form  or
or  , for some weakly positive polynomial
, for some weakly positive polynomial  .
.
Proof. The initial seed  satisfies (
satisfies ( ) condition. Since every cluster seed can be reached by a finite number of cluster mutations, and by the proposition every cluster seed at each step satisfies (
) condition. Since every cluster seed can be reached by a finite number of cluster mutations, and by the proposition every cluster seed at each step satisfies ( ) condition it follows that all cluster seeds satisfy (
) condition it follows that all cluster seeds satisfy ( ) condition. □
) condition. □
Proof. of the Theorem 2.2.3 : By the above corollary it follows that everything satisfies appropriate (
: By the above corollary it follows that everything satisfies appropriate ( ), (
), ( ), (
), ( ), and by the comments in the definitions of (
), and by the comments in the definitions of ( ), (
), ( ), (
), ( ), all three maps (
), all three maps ( ), (
), ( ), (
), ( ) are defined. □
) are defined. □
Proof. of the Theorem 2.2.3 : We will show that
: We will show that  is onto. Let
is onto. Let  be a tilting seed. There exists a finite number of tilting mutations from the initial tilting seed to
be a tilting seed. There exists a finite number of tilting mutations from the initial tilting seed to  . Consider the same sequence of cluster mutations from the initial cluster seed. Use Corollary 2.4.5. □
. Consider the same sequence of cluster mutations from the initial cluster seed. Use Corollary 2.4.5. □
2.5. Fomin-Zelevinsky Conjecture: Cluster Determines Seed.
The following was conjectured by Fomin and Zelevinsky (for any cluster algebra) and we prove it for the acyclic case with no coefficients.
Theorem 2.5.1 (BMRT). Let  and
and  be cluster seeds for an acyclic cluster algebra with no coefficients. Then
be cluster seeds for an acyclic cluster algebra with no coefficients. Then  .
.
Proof.  and
and  are tilting seeds. But,
are tilting seeds. But,  since tilting seed is determined by its tilting object. □
since tilting seed is determined by its tilting object. □
3. Semi-invariants and Cluster Categories
We first recall the definition and some of the classical theorems about semi-invariants, as done by Kac, Schofield, Derksen-Weyman for non-negative integral vectors. After that we state theorems for "mixed signs" integral vectors as done in [IOTW]. In particular, in the Dynkin diagram case, we state the relation between the simplicial complex of the partial tilting objects and the domains of semi-invariants .
3.1. Definitions; Representations and Semi-invariants. Let  be a simply laced quiver, where
be a simply laced quiver, where  denotes the set of the vertices of
denotes the set of the vertices of  , and
, and  is the set of the arrows of
is the set of the arrows of  . Assume
. Assume  has no oriented cycles. Let
has no oriented cycles. Let  be an algebraically closed field. Let
be an algebraically closed field. Let  be the number of the vertices in
be the number of the vertices in  .
.
3.2. Representation space for  . The representation space for a non-negative integral vector
. The representation space for a non-negative integral vector  is the affine space:
is the affine space:

 will be called based representations with dimension vector
will be called based representations with dimension vector  . Every element of
. Every element of  can be viewed as a collection of
can be viewed as a collection of  -matrices, one for each arrow
-matrices, one for each arrow 
 . The group:
. The group: 
 , by
, by  . We use the convention that
. We use the convention that  is the trivial group.
is the trivial group. 3.3. Euler bilinear form. The vertices of the quiver are partially ordered by  if there is a directed path from
if there is a directed path from  to
to  and we choose a fixed extension of this partial ordering to a total ordering. The Euler matrix
and we choose a fixed extension of this partial ordering to a total ordering. The Euler matrix  is defined as
is defined as  matrix with rows and columns labeled by
matrix with rows and columns labeled by  (written in the order described above), with the diagonal entries equal to 1 and the entry
(written in the order described above), with the diagonal entries equal to 1 and the entry  (the number of arrows from
(the number of arrows from  to
to  ) for
) for  . The matrix
. The matrix  gives a nonsymmetric bilinear form
gives a nonsymmetric bilinear form

 , which we call the Euler form.
, which we call the Euler form. 3.4. Some useful facts about the Euler form and Euler matrix.
 , i.e.
, i.e.  for all representations
for all representations  and
and  such that
such that  and
and  .
.- The row of
 corresponding to the vertex
corresponding to the vertex  , consists of coefficients of indecomposable projectives in the expression of
, consists of coefficients of indecomposable projectives in the expression of  .
.  gives coefficient vector of
gives coefficient vector of  in terms of
in terms of  s.
s. always has non-negative coefficients, e.g. if
always has non-negative coefficients, e.g. if  then
then  .
.
3.5. Notation. Let  . We denote by
. We denote by  the following projective representation:
the following projective representation:  . Notice that
. Notice that  .
.
3.6. Canonical projective presentations. Recall, the canonical projective presentation of a representation  , with
, with  is:
is:

 and
and  . The mapping
. The mapping  sends
sends  to
to  by the negative inclusion map; so, the generator of each
by the negative inclusion map; so, the generator of each  maps to -(the image in
maps to -(the image in  of the generator of the corresponding
of the generator of the corresponding  ) and
) and  sends
sends  to
to  by the mapping
by the mapping  induced by the arrow
induced by the arrow  .
. Remark 3.6.1. The representation  can also be described as:
can also be described as:
 and
and  .
.
3.7. Classical results on semi-invariants of quivers.
We recall now the notion of semi-invariants of a group acting on a variety and state the classical results about semi-invariants on the representation spaces of quivers by Kac, Schofield and Derksen-Weyman.
3.8. Definition of semi-invariants. For an algebraic group  acting on a variety
acting on a variety  , an element
, an element  of the coordinate ring of
of the coordinate ring of  is called a semi-invariant, if there exists a character
is called a semi-invariant, if there exists a character  of
of  such that for all
such that for all  and all
and all  :
:

3.9. Semi-invariants of quivers,  . The group
. The group  acts on the representation space
acts on the representation space  (see 3.2). Since the group
(see 3.2). Since the group  is the product of general linear groups, the character
is the product of general linear groups, the character  is the product
is the product  . The integral vector
. The integral vector  is called the weight of the semi-invariant. Note that if
is called the weight of the semi-invariant. Note that if  then
then  is indeterminate.
is indeterminate.
3.10. Fundamental theorems for semi-invariants of quivers. The First fundamental theorem (FFT) states that all semi-invariants of quivers are generated by determinants, the Saturation theorem describes all nonnegative vectors with semi-invariants of a given weight and the third theorem describes Generic decomposition of any non-negative integral vector  .
.
Theorem 3.10.1 (FFT,[S, DW1]). Let  be a quiver and
be a quiver and  . Then the ring of semi-invariants on
. Then the ring of semi-invariants on  is generated by
is generated by  , where
, where

 , and representations
, and representations  satisfy
satisfy  . Furthermore, the weight of the semi-invariant
. Furthermore, the weight of the semi-invariant  is
is  .
. Remark 3.10.2. The condition  is equivalent to saying that the matrix of
is equivalent to saying that the matrix of  is square.
is square.
Definition 3.10.3. Let  . The support of
. The support of  is defined as
is defined as

Theorem 3.10.4 (Saturation,[DW]). Let  . Then:
. Then:

 where
where  means that the general representation of dimension
means that the general representation of dimension  has a subrepresentation of dimension
has a subrepresentation of dimension  .
. Before stating the generic decomposition theorem, recall the following definition: for  ,
,

 is algebraically closed). Since
is algebraically closed). Since  is upper semicontinuous this minimum is attained for generic modules of these dimensions. So, this definition agrees with the usual definition, i.e.
is upper semicontinuous this minimum is attained for generic modules of these dimensions. So, this definition agrees with the usual definition, i.e.  , where
, where  are generic representations with
are generic representations with  and
and  .
. Theorem 3.10.5 (Generic decomposition,[K]). Any  has a unique decomposition of the form
has a unique decomposition of the form  where
where  for all
for all  and each
and each  is a Schur root. Furthermore, general representation
is a Schur root. Furthermore, general representation  with
with  decomposes as
decomposes as  with
with  where
where  are indecomposable representations which do not extend each other.
are indecomposable representations which do not extend each other.
3.11. Virtual representation spaces and Virtual semi-invariants.
In this section we deal with integral vectors (not necessarily non-negative), define non-canonical generalized representation spaces and the virtual representation space as the direct limit of those. Similarly, we define semi-invariants on the generalized representation spaces and virtual semi-invariant as the induced map on the virtual representation space.
3.12. Projective decomposition of integral vectors. Let  and let
and let  with
with  . We refer to
. We refer to  as a projective decomposition of
as a projective decomposition of  . Note that there is a unique minimal projective decomposition where
. Note that there is a unique minimal projective decomposition where  have disjoint supports.
have disjoint supports.
3.13. Generalized representation spaces for integral vectors. Let  . For each projective decomposition
. For each projective decomposition  of
of  , a non-canonical generalized representation space is defined as
, a non-canonical generalized representation space is defined as

3.14. Stabilization maps. Given any  we have the stabilization map:
we have the stabilization map:  which sends
which sends  to
to

3.15. Virtual representation spaces for integral vectors. Let  . Then all representation spaces
. Then all representation spaces  form a directed system with the above stabilization maps. We define the virtual representation space as the direct limit:
form a directed system with the above stabilization maps. We define the virtual representation space as the direct limit:

3.16. Semi-invariants on Generalized representation spaces. The space
 is an affine space with the natural action of the group
is an affine space with the natural action of the group  which is given by
which is given by  for each
for each  . (We point out that this is a different action then in 3.2).
. (We point out that this is a different action then in 3.2).
Since  is an affine space its coordinate ring is a polynomial ring, hence polynomial semi-invariants are defined as in 3.8.
is an affine space its coordinate ring is a polynomial ring, hence polynomial semi-invariants are defined as in 3.8.
3.17. Virtual semi-invariants. A virtual semi-invariant on  is a function
is a function  induced by a family of semi-invariants
induced by a family of semi-invariants  on the representation spaces
on the representation spaces  , which are compatible with stabilization maps (3.14).
, which are compatible with stabilization maps (3.14).
3.18. Characters . Notice that for  , each element of
, each element of  can be written as an
can be written as an  upper triangular matrix
upper triangular matrix  with
with  and diagonal entries
and diagonal entries  The reason is that the vertices are partially ordered by
The reason is that the vertices are partially ordered by  if there is a directed path from
if there is a directed path from  to
to  and this partial ordering is extended to a total ordering to write the matrix.
and this partial ordering is extended to a total ordering to write the matrix.
Remark 3.18.1. Given a projective representation  then any rational character of the group
then any rational character of the group  is of the form:
is of the form:  with the vector
with the vector  ; and
; and  for polynomial characters. As before,
for polynomial characters. As before,  is indeterminate if
is indeterminate if  .
.
Remark 3.18.2. (a) A polynomial SI on  is a polynomial function
is a polynomial function  so that:
so that:  for some character
for some character  , all
, all  and all
and all  .
.
(b) Furthermore  , with
, with  and
and  characters of
characters of  and
and  respectively, and therefore of the form
respectively, and therefore of the form  and
and  for
for  .
.
3.19. Weights of semi-invariants. If  are sincere (nonzero at every vertex) then
are sincere (nonzero at every vertex) then  above, call it
above, call it  . The well-defined
. The well-defined  is called the weight of the SI
is called the weight of the SI  . Since the collection of
. Since the collection of  for sincere pairs
for sincere pairs  is cofinal in the directed system, the weights are well defined for virtual SI and have non-negative coordinates.
is cofinal in the directed system, the weights are well defined for virtual SI and have non-negative coordinates.
3.20. A construction of semi-invariants for  . We show that the determinants also give generalized SI and induce virtual SI.
. We show that the determinants also give generalized SI and induce virtual SI.
Proposition 3.20.1. Let  be a projective decomposition of
be a projective decomposition of  . Let
. Let  be a representation with
be a representation with  . Then:
. Then:
- The function
 is a polynomial SI on the generalized representation space
is a polynomial SI on the generalized representation space  ,
, - Weight(
 )=
)=  .
. - Furthermore,
 is compatible with stabilizations.
is compatible with stabilizations. - The induced semi-invariant
 on the virtual representation space
on the virtual representation space  has also weight equal to
has also weight equal to  .
.
Definition 3.20.2. The support of  is defined to be the set of all
is defined to be the set of all  so that
so that  on
on  for some projective decomposition
for some projective decomposition 
Theorem 3.20.3. (Virtual Saturation Theorem) The support of  is equal to
is equal to

 is the general representation of dimension
is the general representation of dimension  .
. Theorem 3.20.4. (Virtual Generic Decomposition) Any  has a unique decomposition of the form
has a unique decomposition of the form

 for all
for all  ,
,- Each
 is either a Schur root in degree
is either a Schur root in degree  or negative indecomposable projective in degree 1.
or negative indecomposable projective in degree 1.
3.21. The finite case - Dynkin diagrams.
We show that the simplicial complex of the clusters can be identified with the domains of the generalized semi-invariants, which will also be identified with the Igusa-Orr pictures for the sets of simple roots [IO].
3.21.1. Simplicial complex of exceptional (or partial tilting) objects. The simplicial complex of the Dynkin diagram is defined to be the simplicial complex  , with vertex set
, with vertex set

Theorem 3.21.1. (Simplicial complex and domains of semi-invariants theorem) [IOTW]. Let  be a Dynkin diagram of type
be a Dynkin diagram of type  . Then:
. Then:
- The simplicial complex of the exceptional objects is homeomorphic to the
 sphere.
sphere. - The image of the
 skeleton of
skeleton of  in
in  is the union:
is the union: 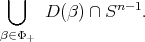
3.21.2. Illustration on the example of  . The image of the
. The image of the  skeleton of
skeleton of  in
in  is the union:
is the union:
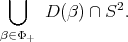
- The quiver is
 with Euler matrix
with Euler matrix 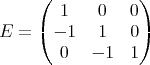
- Circles and semicircles, labeled by
 , denote the domains of semiinvariants (with weight
, denote the domains of semiinvariants (with weight  ).
). - Vertices are labeled by the positive roots
 and negative projective roots.
and negative projective roots. - Positive roots can also be viewed as dimension vectors of indecomposable representations by Gabriel's theorem, e.g.
 .
. - For example:
 has semi-invariants of weights
has semi-invariants of weights  and
and  .
. - For example:
 ,
,  ,
,  ,
, ,
,  all have semi-invariants of weights
all have semi-invariants of weights  since
since  making
making  iff
iff  .
. - The semiinvariant
 on a representation
on a representation 
is
 . This is only well-defined if coordinates
. This is only well-defined if coordinates  are chosen. If these are changed by
are chosen. If these are changed by  then
then  becomes
becomes
So, this semiinvariant has weight
 .
. - In the case
 we have
we have  . So,
. So,  does not contain points
does not contain points  where
where  . So,
. So,  contains no points inside the
contains no points inside the  circle.
circle. - Furthermore, any integral vector belongs to one of the simplices, and the generic decomposition is given in terms of the vertices of that simplex.
4. Homology of Nilpotent, Torsion-free Groups
4.1. Homology of groups and Lie algebras.
4.1.1. Homology of a group. The homology of a group  is defined by
is defined by

More explicitly, we need to choose a free  resolution
resolution  of
of  . Then
. Then  is the homology of the complex
is the homology of the complex  . One standard complex is given by the bar resolution where
. One standard complex is given by the bar resolution where  is the free
is the free  module generated by
module generated by  and the boundary map
and the boundary map  is given by
is given by

 is torsion-free, nilpotent, there is a smaller chain complex in which
is torsion-free, nilpotent, there is a smaller chain complex in which  is generated by the set of all
is generated by the set of all  -element subsets of the nilpotent basis
-element subsets of the nilpotent basis  of
of  , see 4.2.7. There are various descriptions of this complex ([CP1], [IO]). One of the objectives of this work is to give a new canonical description of this smaller complex using root systems and semi-invariants in the case when
, see 4.2.7. There are various descriptions of this complex ([CP1], [IO]). One of the objectives of this work is to give a new canonical description of this smaller complex using root systems and semi-invariants in the case when  is a monomial group (including groups of Dynkin type).
is a monomial group (including groups of Dynkin type). 4.1.2. Homology of a group - topological definition. We recall, but will not use that the homology of the group  is defined topologically by
is defined topologically by  where
where  is the classifying space of the discrete group
is the classifying space of the discrete group  , also known as the Eilenberg-MacLane space
, also known as the Eilenberg-MacLane space  .
.
4.1.3. Rational homology of a group. The rational homology of a group  is
is  .
.
4.1.4. Homology of a Lie algebra. The homology of a Lie algebra  ,
,  , is defined to be the homology of its Koszul complex
, is defined to be the homology of its Koszul complex  given by
given by  with boundary
with boundary  given by
given by
![∑ d(x ∧ ⋅⋅⋅∧ x ) = (- 1)i+j[x ,x ]∧ x ∧ ⋅⋅⋅∧ ^x ∧ ⋅⋅⋅∧ x^ ∧ ⋅⋅⋅∧ x 1 k i j 1 i j k i<j](/img/revistas/ruma/v48n3/3a02797x.png)
4.1.5. Rational homology of a Lie algebra. The rational homology of a Lie algebra  is
is  .
.
4.1.6. Lie algebra  associated to a group
associated to a group  . To every group
. To every group  there is an associated graded Lie algebra
there is an associated graded Lie algebra  given by
given by  with Lie bracket
with Lie bracket
![[ , ] : Li(G ) ⊗ Lj(G ) → Li+j(G )](/img/revistas/ruma/v48n3/3a02805x.png)
given by the commutator: ![[gGi+1,hGj+1 ] := [g,h ]Gi+j+1](/img/revistas/ruma/v48n3/3a02806x.png) .
.
4.2. Torsion-free Nilpotent groups.
4.2.1. Definition of Torsion-free, Nilpotent groups. Let  be a group and
be a group and  the chain of subgroups defined as
the chain of subgroups defined as ![Gi+1 = [G, Gi]](/img/revistas/ruma/v48n3/3a02809x.png) , where
, where ![[ , ]](/img/revistas/ruma/v48n3/3a02810x.png) denotes the group commutator operation, i.e.
denotes the group commutator operation, i.e. ![-1 -1 [g,h] = ghg h](/img/revistas/ruma/v48n3/3a02811x.png) for all
for all  . The group
. The group  is said to be:
is said to be:
- Torsion free if
 is finitely generated free abelian group for all
is finitely generated free abelian group for all  .
.  if there exists an
if there exists an  such that
such that  .
.
Theorem 4.2.1 (Nomizu). [N54] The rational homology of a torsion-free nilpotent group  is isomorphic to the homology of the Lie algebra
is isomorphic to the homology of the Lie algebra  .
.
4.2.3. Remark. Nomizu [N54] gave the first example of a nilpotent torsion free group whose integral homology is not isomorphic to that of the associated Lie algebra. Dwyer [D] points out that the upper triangular matrix group (the nilpotent group associated to the Dynkin diagram  ) has
) has  -torsion in its homology for all
-torsion in its homology for all  . The rational homology is given by the following theorem of Bott and Kostant.
. The rational homology is given by the following theorem of Bott and Kostant.
Theorem 4.2.2. [Bo][Ko] The rank of the  -th homology of the nilpotent subalgebra of a semisimple Lie algebra spanned by the positive roots is equal to the number of elements of the Weyl group of weight
-th homology of the nilpotent subalgebra of a semisimple Lie algebra spanned by the positive roots is equal to the number of elements of the Weyl group of weight  . For example, the rank of
. For example, the rank of  is equal to the number of elements
is equal to the number of elements  of the symmetric group on
of the symmetric group on  letters for which there are
letters for which there are  pairs
pairs  with
with  .
.
4.2.4. Koszul complex. The Koszul complex gives both the integral and rational homology for any Lie algebra  and in particular for the Lie algebra
and in particular for the Lie algebra  and therefore, by Nomizu's theorem, it gives the rational homology of
and therefore, by Nomizu's theorem, it gives the rational homology of  as well.
as well.
4.2.5. Cenkl and Porter. In [CP1] they give an algorithm for constructing the integral cochain complex for the integral cohomology of  . (The integral cohomology determines the integral homology.) In [CP1] they construct a nilpotent torsion free group with a prescribed Lie algebra (the reverse of the usual construction).
. (The integral cohomology determines the integral homology.) In [CP1] they construct a nilpotent torsion free group with a prescribed Lie algebra (the reverse of the usual construction).
4.2.6. A motivation from topology. Kent Orr proved that all Milnor  -invariants of links are represented by elements of
-invariants of links are represented by elements of  of the fundamental group of the complement of the link. Igusa and Orr proved that
of the fundamental group of the complement of the link. Igusa and Orr proved that  has no torsion for nilpotent torsion free groups, using a particular complex in which boundaries are given by "pictures".
has no torsion for nilpotent torsion free groups, using a particular complex in which boundaries are given by "pictures".
4.2.7. Remark. Each nilpotent torsion free group has a finite basis  which can be obtained as the union of preimages of the bases of the free abelian groups
which can be obtained as the union of preimages of the bases of the free abelian groups  for
for  . These elements form a basis in the sense that every element in the group can be expressed uniquely in the form
. These elements form a basis in the sense that every element in the group can be expressed uniquely in the form  where
where  are integers.
are integers.
- Let
 be preimages of a set of basis elements of
be preimages of a set of basis elements of  .
. - Then
 is a minimal set of generators for the group
is a minimal set of generators for the group  , call these elements simple generators.
, call these elements simple generators. - The number
 does not depend on the choice of the basis.
does not depend on the choice of the basis.
4.2.8. Igusa-Orr complex and "pictures". This is a particular ![ℤ [G ]](/img/revistas/ruma/v48n3/3a02854x.png) resolution of
resolution of  , which we will not describe precisely, but the following are some of the important facts about it:
, which we will not describe precisely, but the following are some of the important facts about it:
 is freely generated by the sets of k-element subsets of the basis
is freely generated by the sets of k-element subsets of the basis  .
.- The boundary
 is recursively defined for each subset of
is recursively defined for each subset of  .
. - Boundary is Koszul boundary plus additional terms.
- Boundary for each subset of
 corresponds to a "picture", i.e. a cell decomposition of sphere, satisfying certain necessary and sufficient conditions.
corresponds to a "picture", i.e. a cell decomposition of sphere, satisfying certain necessary and sufficient conditions. - Left and right commutators in the group give the most efficient "collecting process".
- Different forms of commutators. The standard form of commutator is the left commutator
 , the original Igusa-Orr pictures use the right commutator
, the original Igusa-Orr pictures use the right commutator  , and for the Cluster-Semiinvarian pictures it is more convenient to use the middle commutator
, and for the Cluster-Semiinvarian pictures it is more convenient to use the middle commutator  .
.
4.3.1. Definition of Monomial groups. These are special torsion free monomial groups, for which Igusa-Orr pictures are related to the Cluster-Semi-invariant pictures. A group  is called
is called  if it is:
if it is:
- Torsion free,
- Nilpotent and
- There exists a basis
 satisfying:
satisfying: - a:
![[bi,bj] ⊂ B ∪ B -1 ∪ [1]](/img/revistas/ruma/v48n3/3a02873x.png)
- b:
- For any three elements at least two commute
- c:
- For any
 ,
, ![[bi,bj]](/img/revistas/ruma/v48n3/3a02875x.png) commutes with both
commutes with both  and
and 
4.3.2. Maximal monomial groups. These will be monomial groups which are maximal in the following sense (but we need to point out a few facts):
- The number of elements in
 is an invariant of the group G.
is an invariant of the group G. - Monomial groups with
 simple generators, for a fixed
simple generators, for a fixed  , are partially ordered by epimorphisms of groups, which send simple generators to simple generators (or their inverse).
, are partially ordered by epimorphisms of groups, which send simple generators to simple generators (or their inverse). - Maximal elements with respect to this partial order are called Maximal monomial groups.
4.3.3. Dynkin diagrams and Maximal monomial groups. To each simply laced Dynkin diagram  with the set of positive roots
with the set of positive roots  , we associate a group
, we associate a group  defined by:
defined by:
- Generators:
 and
and - Relations:
![{ [Θ (α),Θ (β)] = Θ(α + β )ε(α,β)](/img/revistas/ruma/v48n3/3a02890x.png) where
where  if
if  and
and  otherwise
otherwise . Here
. Here  denotes the Euler form.
denotes the Euler form.
We have the following facts, questions (and work in progress):
- Simply laced Dynkin diagrams define maximal monomial groups.
- Are all maximal monomial groups given by simply laced Dynkin diagrams (A,D,E) as above?
- Description of the groups (with appropriate modifications of the condition (3)), which will correspond to the other Dynkin diagrams (B,C,F,G).
4.4.1. An  example of Igusa-Orr picture.
example of Igusa-Orr picture.
- Circles and semicircles are labeled by positive roots
 for the Dynkin diagram
for the Dynkin diagram  . Any positive root
. Any positive root  is expressed as a sum of simple roots
is expressed as a sum of simple roots 
- For the middle-commutator I-O picture the same labels are used for the elements of the associated nilpotent group
 , i.e. any positive root
, i.e. any positive root  actually stands for
actually stands for  , see 4.3.3.
, see 4.3.3. - A free
 resolution of
resolution of  is given by
is given by  free module generated by subsets of
free module generated by subsets of  with
with  elements, and with boundary given by the pictures.
elements, and with boundary given by the pictures. - The following picture describes the boundary
 as:
as: 
- Each term in the sum corresponds to a vertex, and is obtained by "reading" the picture.
- Circles and semicircles are labeled by positive roots
 for the Dynkin diagram
for the Dynkin diagram  . Labeling agrees with the same labeling of the same picture by the domains of semiinvariants.
. Labeling agrees with the same labeling of the same picture by the domains of semiinvariants.
4.4.2. I-O vs C-SI pictures. The original, right commutator Igusa-Orr and Cluster-Semiinvariant pictures are given below for the example of Dynkin diagram  .
.
- I-O picture has 12 tri-angles, 1 quadr-angle, 1 bi-angle
- C-SI picture is a simplicial complex, triangulation of a shpere with 14 tri-angles.
I-O  C-SI C-SI  |
- Igusa-Orr pictures are Koszul boundary plus higher terms.
- Cluster-Semiinvariant pictures are modified Koszul boundary plus higher terms.
- Cluster-Semiinvariant pictures are more natural - simplicial complex.
- Plan to re-do Igusa-Orr algorithm to construct all Cluster-Semiinvariant pictures.
- Cluster-Semiinvariant pictures give the middle commutator Igusa-Orr pictures for the particular subset consisting of the simple generators
 of the group
of the group  , which actually correspond to the set of simple roots in
, which actually correspond to the set of simple roots in  .
. - We believe that Cluster-Semiinvariant pictures can be used to construct, in a functorial way, all middle-commutator I-O pictures (for all subsets of
 .
.
This work was presented at:
CIMPA - UNESCO - ARGENTINA
Homological methods and representations of non-commutative algebras.
Mar del Plata,
Argentina
March 6 - 17, 2006
[Bo] Bott, Raoul, Homogeneous vector bundles, Ann. of Math. (2), 66, (1957), 203-248. [ Links ]
[BMR1] Buan A., Marsh R., Reiten I. Cluster-tilted algebras, preprint (2004) math.RT/0402075, to appear in Trans. Amer. Math. Soc. [ Links ]
[BMR2] Buan A., Marsh R., Reiten I. Cluster mutation via quiver representations, preprint (2004) math.RT/0412077 [ Links ]
[BMRT] Buan A., Marsh R., Reiten I., Todorov G. , preprint math.RT/, to appear in .(2004) [ Links ]
[BMRRT] Buan A., Marsh R., Reineke M., Reiten I., Todorov G. Tilting theory and cluster combinatorics, preprint math.RT/0402054, to appear in Adv. Math. (2004) [ Links ]
[CC] Caldero P., Chapoton F. Cluster algebras from cluster categories, preprint math.RT/0410187, (2004) [ Links ]
[CCS1] Caldero P., Chapoton F., Schiffler R., Quivers with relations arising from clusters ( case)., Preprint arxiv:math.RT/0401316, January 2004, to appear in Trans. Amer. Math. Soc. [ Links ]
case)., Preprint arxiv:math.RT/0401316, January 2004, to appear in Trans. Amer. Math. Soc. [ Links ]
[CCS2] Caldero P., Chapoton F., Schiffler R., Quivers with relations and cluster tilted algebras. Preprint arxiv:math.RT/0411238, November 2004. [ Links ]
[CK1] Caldero P., Keller B. From triangulated categories to cluster algebras, preprint math.RT/0506018, (2005) [ Links ]
[CK2] Caldero P., Keller B. From triangulated categories to cluster algebras II, preprint math.RT/0510251, (2005) [ Links ]
[CP1] Bohumil Cenkl and Richard Porter, Algorithm for the computation of the cohomology of I-groups, Algebraic topology (San Feliu de Guíxols, 1990), Lecture Notes in Math., vol. 1509, Springer, Berlin, 1992, pp. 79-94. [ Links ]
[CP2] Bohumil Cenkl and Richard Porter, Nilmanifolds and associated Lie algebras over the integers, Pacific J. Math. 193 (2000), no. 1, 5-29. [ Links ]
[D] W. G. Dwyer, Homology of integral upper-triangular matrices, Proc. Amer. Math. Soc. 94 (1985), no. 3, 523-528. [ Links ]
[DW1] Harm Derksen and Jerzy Weyman, Semi-invariants of quivers and saturation for Littlewood-Richardson coefficients. J. Amer. Math. Soc. 13 467-479 (2000). [ Links ]
[DW] Harm Derksen and Jerzy Weyman, On the canonical decomposition of quiver representations, Compositio Math. 133 (2002), no. 3, 245-265. [ Links ]
[FZ1] Fomin S., Zelevinsky A. Cluster Algebras I: Foundations, J. Amer. Math. Soc. 15, no. 2, 497-529 (2002) [ Links ]
[FZ2] Fomin S., Zelevinsky A. Cluster Algebras II: Finite type classification. Invent. Math. 154 (2003), no. 1, 63-121. [ Links ]
[FZ3] Fomin S., Zelevinsky A. Cluster Algebras III: Upper bounds and double Bruhat cells. Duke Math J. 126 (2005), No. 1, 1-52. [ Links ]
[IO] Kiyoshi Igusa and Kent E. Orr, Links, pictures and the homology of nilpotent groups, Topology 40 (2001), no. 6, 1125-1166. [ Links ]
[K] V. G. Kac, Infinite root systems, representations of graphs and invariant theory, Invent. Math. 56 (1980), no. 1, 57-92. [ Links ]
[Ko] Kostant, Bertram, Lie algebra cohomology and the generalized Borel-Weil theorem, Ann. of Math. (2), 74,(1961), 329-387. [ Links ]
[Kel] Keller B. On triangulated orbit categories, preprint, math.RT/0503240, (2005) [ Links ]
[Ker] Kerner O. ??? [ Links ]
[MRZ] Marsh R., Reineke M., Zelevinsky A. Generalized associahedra via quiver representations, Trans. Amer. Math. Soc. 355, no.10,4171-4186 (2003). [ Links ]
[N54] Nomizu, Katsumi . On the cohomology of compact homogeneous spaces of nilpotent Lie groups, Ann. of Math. (2) 59 (1954), 531-538. [ Links ]
[RT] Reiten I., Todorov G. Unpublished [ Links ]
[S] Aidan Schofield, Semi-invariants of quivers, J. London Math. Soc. (2) 43 (1991), no. 3, 385-395. [ Links ]
Gordana Todorov
Northeastern University
Department of Mathematics
360 Huntington Avenue
Boston, MA 02115, USA
todorov@neu.edu
Recibido: 1 de marzo de 2007
Aceptado: 27 de noviembre de 2007

