










Services on Demand
Journal

Article
 English (pdf)
English (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO
Related links
-
 Similars in
SciELO
Similars in
SciELO
Share

 Permalink
PermalinkRevista de la Unión Matemática Argentina
Print version ISSN 0041-6932On-line version ISSN 1669-9637
Rev. Unión Mat. Argent. vol.49 no.2 Bahía Blanca July/Dec. 2008
Minimal hermitian matrices with fixed entries outside the diagonal
E. Andruchow, L. E. Mata-Lorenzo, A. Mendoza, L. Recht and A. Varela
Dedicated to the memory of Mischa Cotlar. Teacher and friend.
Abstract. We survey some results concerning the problem of finding the complex hermitian matrix or matrices of least supremum norm with variable diagonal. Some cualitative general results are given and more specific descriptions are shown for the 3 × 3 case. We also comment some results and examples concerning this approximation problem.
2000 Mathematics Subject Classification: 15A57, 47A58, 47C15
Key words and phrases. short curves, flag manifolds, matrix nearness, nearest diagonal.
Contents
1. Notation and Preliminaries
2. Previous results
3. Description of minimal hermitian matrices of 3 × 3
4. Minimal matrices in a class
5. Different cases
6. The topology of the set of minimal matrices of 3 × 3
7. An example in 4 × 4 using minimal matrices
References
The problem of finding a complex hermitian matrix of least supremum norm with variable diagonal originally aroused when describing short curves in certain flag manifolds. A finite dimensional flag manifold is one such that its elements are chains of vector spaces included strictly. That is

 . The metric considered here is the invariant Finsler metric that will be described further on.
. The metric considered here is the invariant Finsler metric that will be described further on. We will be interested in the special case of complete flags, that is when  .
.
The flags could be seen from different points of view. For example if we choose bases for the respective subspaces (that can be taken orthonormal), that is if
![Vi = [w1,⋅⋅⋅ ,wi ]](/img/revistas/ruma/v49n2/2a037x.png)
They can also be described choosing sets of orthonormal projections of rank one which sum gives the identity, that is:

Yet another way of representing flag manifolds is by the quotient between the group of  unitary complex matrices
unitary complex matrices  over the subgroup of the unitary diagonals
over the subgroup of the unitary diagonals  :
:
![{ } U /U = [v] : x ∈ [v] ⇔ . diag x = u.v, with u ∈ Udiag](/img/revistas/ruma/v49n2/2a0312x.png)
 are the classes
are the classes ![[v ]](/img/revistas/ruma/v49n2/2a0314x.png) with elements of the form
with elements of the form 
We will use the following notation

 algebra of matrices of complex coefficients, the hermitian and the anti-hermitian respectively.
algebra of matrices of complex coefficients, the hermitian and the anti-hermitian respectively. We will also denote with

 , the hermitian (that is real) and anti-hermitian respectively. Observe that
, the hermitian (that is real) and anti-hermitian respectively. Observe that  .
. We will consider the quotient spaces

 :
: ![|[M ]| = inf ||M + D ||, q D∈Dhn×n](/img/revistas/ruma/v49n2/2a0323x.png) (1) (1) |
where  is the usual operator (supremum) norm (respectively
is the usual operator (supremum) norm (respectively  and
and  for the anti-hermitian case).
for the anti-hermitian case).
The quotient space  can be identified with the tangent of the space
can be identified with the tangent of the space  in the base point
in the base point  , since
, since  is an homogeneous space under the natural action of left multiplication of elements of
is an homogeneous space under the natural action of left multiplication of elements of  :
:
![ah ah T (U /U diag)[1] = T (U )[1]/T (U diag)[1] ~= M n×n(ℂ )∕D n×n.](/img/revistas/ruma/v49n2/2a0332x.png)
Moreover, the Finsler metric considered in ![T (U /U diag )[1]](/img/revistas/ruma/v49n2/2a0333x.png) coincides with the quotient norm (1) of
coincides with the quotient norm (1) of  .
.
This will let us link geometric results to the problem we are interested to describe in this article. For instance, in theorem 1 of the next section, the existence of matrices  reaching the minimum of the norm quotient (1) is related with the existence of curves in
reaching the minimum of the norm quotient (1) is related with the existence of curves in  of the shortest posible length. In section 7, an example in
of the shortest posible length. In section 7, an example in  of infinite different curves of the shortest length joining arbitrarily close points is shown.
of infinite different curves of the shortest length joining arbitrarily close points is shown.
Operator approximation problems consist of finding, for a given operator, the element in some special class nearest to it, when distance is measured with a norm. These problems have been treated in the case of hermitian, positive and unitary approximants using different norms in [5], [6], [7], and others. The survey article [8] is related to matrix nearness. There, explicit formulas of operator approximation solutions are presented. Uniqueness results and algorithms for computing or estimating the minimal norm attained are also described, as well as the matrix or matrices sought in different contexts. Nevertheless, in that paper, the operator or supremum norm is not considered.
The problem of finding the minimum of  for a given matrix
for a given matrix  among all the diagonal matrices
among all the diagonal matrices  , and finding the matrix or matrices
, and finding the matrix or matrices  that realize the minimum, is indeed an operator approximation problem. It has a trivial translation to the problem of finding a real diagonal matrix
that realize the minimum, is indeed an operator approximation problem. It has a trivial translation to the problem of finding a real diagonal matrix  that satisfies that
that satisfies that  and that
and that  is minimum.
is minimum.
In the  case, some bounds of this minimum were obtained in [3]. In that work the calculation of this minimum is related to the estimation of bounds of the norm of the operator
case, some bounds of this minimum were obtained in [3]. In that work the calculation of this minimum is related to the estimation of bounds of the norm of the operator  that for any
that for any  matrix replaces all its diagonal entries by zeroes.
matrix replaces all its diagonal entries by zeroes.
Definition 1. We will call a matrix  minimal hermitian if
minimal hermitian if

![∥Z ∥ = |[Z ]|q.](/img/revistas/ruma/v49n2/2a0350x.png)
![h h [Z] ∈ M n×n(ℂ )∕D n×n](/img/revistas/ruma/v49n2/2a0351x.png) . In a similar way it can be defined a minimal antihermitian matrix.
. In a similar way it can be defined a minimal antihermitian matrix. Remark 1. If  is a minimal hermitian matrix and
is a minimal hermitian matrix and

 is a minimal antihermitian matrix.
is a minimal antihermitian matrix. are eigenvalues of
are eigenvalues of  .
.- The diameter of the spectrum of
 is
is  .
. - If
 is of
is of  then
then  with
with  .
.
In Theorem I of [4], Durán, Mata-Lorenzo and Recht proved a result that, in the context of matrices, can be stated as follows:
Let ![[M ] ∈ U /Udiag](/img/revistas/ruma/v49n2/2a0363x.png) and
and ![∕ [X ] ∈ M anh×n (ℂ ) Danh×n ~= T (U /U diag)[M ]](/img/revistas/ruma/v49n2/2a0364x.png) . If there exists a antihermitian minimal matrix
. If there exists a antihermitian minimal matrix  that projects in
that projects in ![[X ]](/img/revistas/ruma/v49n2/2a0366x.png) , that is,
, that is, ![[Z ] = [X ]](/img/revistas/ruma/v49n2/2a0367x.png) and
and ![||Z || = |[X ]| q](/img/revistas/ruma/v49n2/2a0368x.png) , then the curve
, then the curve
![γ (t) = LetZ ⋅ [M ] = [etZM ]](/img/revistas/ruma/v49n2/2a0369x.png)
 that join
that join  with
with  for each
for each  with
with  .
. Remark 2. Note that this theorem implies that, in order to find the curve of minimum length such that ![˙γ(0) = [X ]](/img/revistas/ruma/v49n2/2a0375x.png) , we have to find the matrix
, we have to find the matrix  with the same off-diagonal entries as
with the same off-diagonal entries as  and with a diagonal that makes
and with a diagonal that makes  a minimal hermitian matrix.
a minimal hermitian matrix.
This result shows the importance of the set of minimal matrices in the study of the shortest curves (in the geometric sense) in these homogeneus spaces.
With the ideas of Section 5 of [4], resctricted to the context of matrices, the following characterization of minimal hermitian matrices can be obtained:
Theorem 2. A hermitian matrix  is minimal, if and only if, there exists a positive matrix
is minimal, if and only if, there exists a positive matrix  such that,
such that,
 , where
, where  .
.- The diagonal elements of the product
 are all zero.
are all zero.
3. Description of minimal hermitian matrices of 3 × 3
The previous theorem about minimal matrices together with auxiliary results in  (see [1]), allow the following characterization:
(see [1]), allow the following characterization:
Theorem 3. Let  with
with  . Then
. Then  is minimal, if and only if, there exist two unitary eigenvectors,
is minimal, if and only if, there exist two unitary eigenvectors,
 for the eigenvalue
for the eigenvalue  , and
, and for the eigenvalue
for the eigenvalue  ,
,
such that their respective coordinates have the same absolute value

Remark 3. Under these hypotheses, it can be proved that the eigenvectors  and
and  are triangular, that is,
are triangular, that is,  ,
,  and
and  can represent the sides of a triangle (the sum of any two of them is always greater than the other one, see figure 1).
can represent the sides of a triangle (the sum of any two of them is always greater than the other one, see figure 1).
Parametrization of the set of minimal matrices of 3 × 3
Definition 2. Let  . We will say that
. We will say that  is of extremal type if there exist
is of extremal type if there exist
 ,
, ,
, with
with  ,
,
such that  is some of the following three matrices:
is some of the following three matrices:

Definition 3. Let  . We will say that
. We will say that  is of non extremal type if there exist:
is of non extremal type if there exist:
 ,
, with
with  ,
,  ,
, ,
,  , with:
, with: 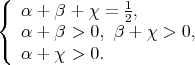
such that
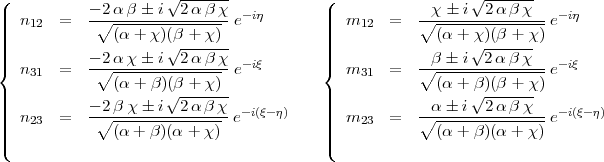
for one of the two corresponding choices of the signs.
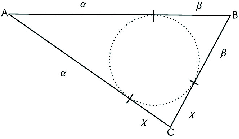
| Figure 1: | Construction of  and and  appearing in the parametrization. appearing in the parametrization. |
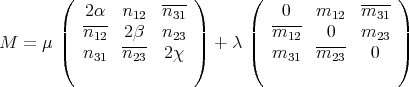
Remark 4. For matrices of both types (extremals and non extremals), the parameters  and
and  give the norm of
give the norm of  ,
,  , and the trace of
, and the trace of  ,
,  .
.
In the previous Theorem 3 we have seen that  , with
, with  is minimal, if and only if, there exist unitary eigenvalues
is minimal, if and only if, there exist unitary eigenvalues  and
and  of
of  and
and  such that their coordinates have equal absolute value.
such that their coordinates have equal absolute value.
The following theorem gives a description of all the minimal hermitian matrices of  in terms of the parameters
in terms of the parameters  ,
,  ,
,  ,
,  ,
,  ,
,  and
and  .
.
Theorem 4. [Parametrization theorem] Let  , then,
, then,  is minimal, if and only if, verifies any of the following mutually exclusive cases:
is minimal, if and only if, verifies any of the following mutually exclusive cases:
- The eigenvector
 of
of  has a zero coordinate and
has a zero coordinate and  is of extremal type.
is of extremal type. - The eigenvector
 of
of  has no zero coordinates and
has no zero coordinates and  is of non extremal type.
is of non extremal type.
4. Minimal matrices in a class
Every matrix  can be writen in the form,
can be writen in the form,
where  and
and  .
.
We already observed that, if  is minimal hermitian (not null), the eigenvalues of
is minimal hermitian (not null), the eigenvalues of  are
are  ,
,  and
and  (with
(with  ).
).
If we consider the characteristic polynomial of  :
:

 and
and  :
: 
Then for specific class of a matrix ![[M0 ]](/img/revistas/ruma/v49n2/2a03167x.png) (that is for
(that is for  ,
,  and
and  fixed)
fixed)
 given by the equation:
given by the equation: 
 ,
,  and
and  :
: 
 this manifold.
this manifold. Every minimal matrix  of
of ![[M0 ]](/img/revistas/ruma/v49n2/2a03180x.png) must belong to this manifold and must minimize
must belong to this manifold and must minimize

 .
. To simplify the expression of the map  , the following linear change of variables can be introduced,
, the following linear change of variables can be introduced,



 ,
, 
To find the minimal matrix (or matrices) in the class ![[M0 ]](/img/revistas/ruma/v49n2/2a03189x.png) we have to minimize
we have to minimize  on
on  . We shall consider four cases depending on the triple
. We shall consider four cases depending on the triple  . Figures representing
. Figures representing  using the
using the  ,
,  and
and  variables are shown in each case. It can be proved that only in the fourth case there might be multiple minima in the given class
variables are shown in each case. It can be proved that only in the fourth case there might be multiple minima in the given class ![[M ] 0](/img/revistas/ruma/v49n2/2a03197x.png) . Two rounded surfaces, shown in the first three figures, do not belong to
. Two rounded surfaces, shown in the first three figures, do not belong to  , they represent the bounding surfaces
, they represent the bounding surfaces  in between which the (unique) minimum is located.
in between which the (unique) minimum is located.
- When
 . In this case the surface
. In this case the surface  is regular (a smooth manifold) and the method of Lagrange multipliers can be used to find the unique minimum in the class. In the figure to the right, the middle portion represents the component satisfying
is regular (a smooth manifold) and the method of Lagrange multipliers can be used to find the unique minimum in the class. In the figure to the right, the middle portion represents the component satisfying  , and the dark point indicates the minimum.
, and the dark point indicates the minimum. 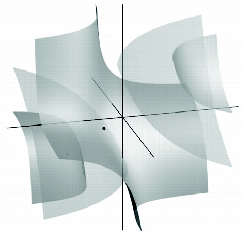
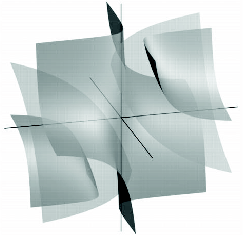
- When
 and
and  . In this case the surface
. In this case the surface  is not regular, has one singular point which is the unique minimum in the class. In the figure to the right, two components of
is not regular, has one singular point which is the unique minimum in the class. In the figure to the right, two components of  touch at the singular point which is the minimum.
touch at the singular point which is the minimum. 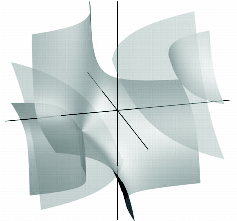
- When exactly one coordinate of
 is null. In this case the surface
is null. In this case the surface  is regular; the class has a unique minimum at the origin,
is regular; the class has a unique minimum at the origin,  . Observe that in the figure the vertical
. Observe that in the figure the vertical  -axis lies in
-axis lies in  .
. 
- When exactly two coordinates of
 are null. In this case the surface
are null. In this case the surface  is not regular along two curves, the two branches of the hyperbola shown in the figure, and the class has multiple minima, represented by the segment shown in the figure joining the two branches of the hyperbola.
is not regular along two curves, the two branches of the hyperbola shown in the figure, and the class has multiple minima, represented by the segment shown in the figure joining the two branches of the hyperbola. 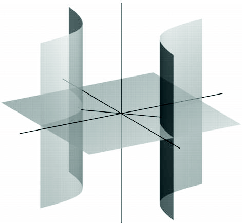
Remark 1. Despite this last case, there is no multiplicity of minimal curves of matrices in  and all multiple minimal matrices
and all multiple minimal matrices  produce the same curve
produce the same curve ![γ(t) = [etZM ]](/img/revistas/ruma/v49n2/2a03220x.png) for
for  .
.
If the matrix  is real with zero diagonal and we suppose that there is a diagonal
is real with zero diagonal and we suppose that there is a diagonal  that reaches the minimum of
that reaches the minimum of  and such that
and such that  has all of its eigenvalues of equal absolute value (that is, the spectrum of
has all of its eigenvalues of equal absolute value (that is, the spectrum of  is
is  and
and  or
or  has double multiplicity), then a precise formula of
has double multiplicity), then a precise formula of  can be found in terms of the entries of
can be found in terms of the entries of  (this proposition is proved in [10] motivated by results of [9]). We state it here as the following remark:
(this proposition is proved in [10] motivated by results of [9]). We state it here as the following remark:
Remark 2. Let  , with
, with  , be a matrix in
, be a matrix in  and
and  be a diagonal such that
be a diagonal such that  is minimum and the eigenvalues of
is minimum and the eigenvalues of  have equal absolute value. Then
have equal absolute value. Then  must be of the form
must be of the form

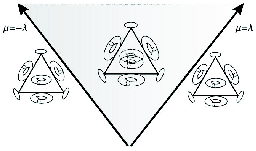
6. The topology of the set of minimal matrices of 3 × 3
Using the theorem of parametrization and considering the sets



 is the unitary circle in the complex plane and
is the unitary circle in the complex plane and 
 .
. Let us consider in  the smallest equivalent relation ‘
the smallest equivalent relation ‘ ' that identifies the elements of
' that identifies the elements of  that give the same matrix in the theorem of parametrization. Then, it can be proved that the set
that give the same matrix in the theorem of parametrization. Then, it can be proved that the set  is homemophic to the set of minimal hermitian matrices.
is homemophic to the set of minimal hermitian matrices.
The following is a representation of the set of minimal hermitian matrices through  .
.
7. An example in 4 × 4 using minimal matrices
We have remarked that in  , despite of the existence of matrices that allow infinite minimizing diagonals, there are no multiplicity of short curves. This is not the case in
, despite of the existence of matrices that allow infinite minimizing diagonals, there are no multiplicity of short curves. This is not the case in  .
.
Let us consider the manifold

 is the special unitary group (unitary complex matrices with determinant equal to
is the special unitary group (unitary complex matrices with determinant equal to  ) and with the Finsler metric in
) and with the Finsler metric in  as in the
as in the  case.
case. Using a suitable description (see [2] and [11] for details) we can consider  , where
, where  is the unit sphere in
is the unit sphere in  . This gives a better geometrical view of the example. Let us outline which are the properties of the curves mentioned at the beginning of the section.
. This gives a better geometrical view of the example. Let us outline which are the properties of the curves mentioned at the beginning of the section.
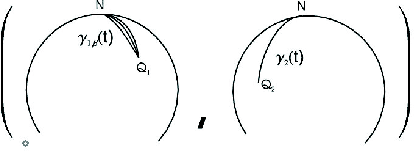
Let  be the point whose coordinates are both the North Pole,
be the point whose coordinates are both the North Pole,  . Let
. Let  be any point such that
be any point such that  has higher latitude than
has higher latitude than  in
in  (
( is closer to
is closer to  than
than  ).
).
 is going to be fixed so that is going to be fixed so that  is above the equator line (and is above the equator line (and  is even higher). In [2], using the characterizations of minimal matrices seen previously, a family of minimal curves is even higher). In [2], using the characterizations of minimal matrices seen previously, a family of minimal curves ![Γ β(t) = (γ1,β (t),γ2(t)), for t ∈ [0,1]](/img/revistas/ruma/v49n2/2a03277x.png) , was constructed, all joining , was constructed, all joining  to to  , with the following properties. , with the following properties.
|
 in
in  will trace the smaller arc of the great circle that contains
will trace the smaller arc of the great circle that contains  and
and  .
. will vary continuously with the parameter
will vary continuously with the parameter  .
. will parameterize the smaller arc of some circle in
will parameterize the smaller arc of some circle in  that joins
that joins  to
to  ; the arcs will not be great circles but for
; the arcs will not be great circles but for  .
. runs over a great circle in
runs over a great circle in  .
. varies continuously with the parameter
varies continuously with the parameter  .
. has constant speed in
has constant speed in  .
. has constant speed in
has constant speed in  .
.The following is a representation of these curves in  :
:
|
|
[1] Andruchow, Esteban; Mata-Lorenzo, Luis E.; Recht, Lázaro; Mendoza, Alberto; Varela, Alejandro. Minimal matrices and the corresponding minimal curves on flag manifolds in low dimension, preprint. [ Links ]
[2] Andruchow, Esteban; Mata-Lorenzo, Luis E.; Recht, Lázaro; Mendoza, Alberto; Varela, Alejandro. Infinitely many minimal curves joining arbitrarily close points in a homogeneous space of the unitary group of a  -algebra. Rev. Un. Mat. Argentina 46 (2005), no. 2, 113–120 (2006). [ Links ]
-algebra. Rev. Un. Mat. Argentina 46 (2005), no. 2, 113–120 (2006). [ Links ]
[3] Bhatia, R., Choi, M.D., Davis, C. Comparing a matrix to its off-diagonal part. The Gohberg anniversary collection, Vol. I (Calgary, AB, 1988), 151–164, Oper. Theory Adv. Appl., 40, Birkhauser, Basel, 1989. [ Links ]
[4] Durán, C.E., Mata-Lorenzo, L.E., Recht, L., Metric geometry in homogeneous spaces of the unitary group of a C -algebra: Part I–minimal curves, Adv. Math. 184 No. 2 (2004), 342-366. [ Links ]
-algebra: Part I–minimal curves, Adv. Math. 184 No. 2 (2004), 342-366. [ Links ]
[5] Fan, K., Hoffman, A.J., Some metric inequalities in the space of matrices, Proc. Amer. Math. Soc., 6 (1955) 11-116. [ Links ]
[6] Halmos, P.R., Positive approximants of operators, Indiana Univ. Math. J., 21 (1972), 951–960. [ Links ]
[7] Halmos, P.R., Spectral approximants of normal operators, Proc. Edinburgh Math. Soc., 19 (1974), 51–58. [ Links ]
[8] Higham, N.J., Matrix nearness problems and applications, Applications of Matrix Theory, Oxford University Press, 1989, 1–27. [ Links ]
[9] Mata-Lorenzo, L.E., Recht, L. Convexity properties of ![T r[(a* a)n]](/img/revistas/ruma/v49n2/2a03310x.png) , Linear Algebra and its Applications 315 (2000), 25-38. [ Links ]
, Linear Algebra and its Applications 315 (2000), 25-38. [ Links ]
[10] Varela, A., Villagra, M.P., Algunos resultados de minimización de matrices de dia-gonal variable, preprint. [ Links ]
[11] Whittaker, E. T. A Treatise on the Analytical Dynamics of Particles and Rigid Bodies, Cambridge University Press, London, 1988. [ Links ]
Esteban Andruchow
Instituto de Ciencias,
Universidad Nacional de Gral. Sarmiento,
J. M. Gutierrez 1150, (1613) Los Polvorines,
Argentina
eandruch@ungs.edu.ar
Luis E. Mata-Lorenzo
Universidad Simón Bolívar,
Apartado 89000, Caracas 1080A, Venezuela
lmata@usb.ve
Alberto Mendoza
Universidad Simón Bolívar,
Apartado 89000, Caracas 1080A, Venezuela
jacob@usb.ve
Lázaro Recht
Universidad Simón Bolívar,
Apartado 89000, Caracas 1080A, Venezuela
recht@usb.ve
Alejandro Varela
Instituto de Ciencias,
Universidad Nacional de Gral. Sarmiento,
J. M. Gutierrez 1150, (1613) Los Polvorines,
Argentina
avarela@ungs.edu.ar
Recibido: 10 de abril de 2008
Aceptado: 15 de mayo de 2008

