










Servicios Personalizados
Revista

Articulo
 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkAnales (Asociación Física Argentina)
versión impresa ISSN 0327-358Xversión On-line ISSN 1850-1168
An. AFA vol.30 no.4 Buenos Aires dic. 2019
https:/doi.org/10.31527/analesafa.2019.30.4.90
FÍSICA DE LA ATMÓSFERA, LA TIERRA Y EL AGUA. FÍSICA DEL MEDIO AMBIENTE
Estimación de la constante dieléctrica del suelo mediante reflectometría GNSS y método de patrón de interferencia
Soil dielectric constant estimation using GNSS reflectometry and the interference pattern technique
E. N. Gomes *1
J. Arellana**1
M. Franco2
F. Grings2
E. More3
1 Universidad de Buenos Aires, Facultad de Ciencias Exactas y Naturales, Departamento de Física, Ciudad Universitaria, Int. Güiraldes 2160, Buenos Aires, CABA, C1428EGA, Argentina.
2 CONICET - Universidad de Buenos Aires, Instituto de Astronomía y Física del Espacio (IAFE), Ciudad Universitaria, Av. Cantilo S/N, Buenos Aires, C1428ZAA, Argentina.
3 Instituto de Altos Estudios Espaciales "Mario Gulich", CONAE, Ruta C45 Km 8, Falda del Cañete, Córdoba, Argentina.
Autor para correspondencia: N. E. Gomez, email: eugenianoelg@gmail.com; J. Arellana, email: arellana.javier.e@gmail.com
Recibido: 23/12/2019
Aceptado: 09/01/2020
Resumen:
En este trabajo presentamos una forma innovadora y de bajo costo para estimar la constante dieléctrica de suelos reales -relacionada con la humedad del mismo- utilizando señal satelital GPS. Con un dispositivo automatizado se siguió la trayectoria de los satélites y con una antena tipo patch se realizaron las mediciones del patrón de interferencia generado por la señal directa del GPS y la reflejada por el suelo. Para analizar la señal adquirida se utilizó un modelo de dispersión electromagnética basado en el método de pequeñas perturbaciones, que puede incluir estratificaciones en el medio subterráneo y a partir del cual se obtuvo la constante dieléctrica que mejor ajusta a las mediciones. Estos valores fueron comparados contra los obtenidos con un sensor de humedad que mide la constante dieléctrica in-situ. Las comparaciones muestran que el método basado en el patrón de interferencia brinda resultados satisfactorios para estimar la constante dieléctrica del suelo. Finalmente, se delinean propuestas para mejorar los resultados obtenidos en este trabajo.
Palabras clave: reflectometría GNSS, interferometría, humedad del suelo, algoritmos de inversión.
Abstract:
In this work we present an innovative and low-cost way to estimate the dielectric constant of real soils -which is related to soil moisture- using GPS satellite signal. The trajectory of the satellites was followed with an automated device, and with an antenna type patch was measured the interference pattern generated by the direct GPS signal and that reflected by the ground. To analyze the acquired signal, an electromagnetic dispersion model based on the method of small perturbation was used, which may include stratifications in the underground and from which the dielectric constant that best fits the measurements was obtained. These values were compared with the obtained using a sensor that measures the soil dielectric constant in-situ. The comparisons show that the method based on the interference pattern provides satisfactory results to estimate the dielectric constant of real bare soils. Finally, proposals are outlined to improve the results obtained in this work.
Keywords: GNNS reflectometry, interferometry, soil moisture, retrieval approach.
I. Introducción
La humedad del suelo es una variable geofísica clave que sólo puede estimarse a escalas regionales mediante técnicas de teledetección, haciendo uso de la relación que existe entre ella y la constante dieléctrica (ε) en el rango de las microondas (rango de frecuencias de los sensores remotos)(1,2). En la actualidad, la técnica más común para medir la humedad del suelo es mediante el uso de sensores in-situ, ya que poseen facilidad de uso y resultan altamente confiables. Sin embargo, no pueden registrar la variabilidad espacial que presenta esta magnitud biofísica en escalas regionales, lo que torna indispensable el uso de sensores remotos para este propósito. Existen diferentes tipos de sensores remotos que se han utilizado en plataformas aéreas y espaciales para la estimación de la humedad del suelo (u otras propiedades de dispersión del suelo). Las dos opciones más comunes de estimación son a partir de la energía retrodispersada y de la energía emitida por el suelo en el rango de las microondas. Los sensores que miden esta energía se pueden clasificar a la vez como sensores activos o pasivos(1,2).
Entre los sensores activos se pueden identificar esencialmente los radares de microondas. Estos transmiten pulsos electromagnéticos que luego son recibidos con la misma antena que trasmitió el pulso (radar monoestático) o con una antena diferente ubicada a cierta distancia de la superficie iluminada (radar biestático). Entre ellos se encuentran los dispersómetros y los denominados Radares de apertura sintética (SAR, Synthetic Aperture Radar)(1,2). Los SAR poseen una alta resolución espacial, del orden del metro, atribuible al pos-procesamiento de la señal que realizan. Son capaces de aprovechar el movimiento de la plataforma para combinar coherentemente un conjunto sucesivo de pulsos de radar. Esto crea una apertura sintética que permite mejorar la resolución final a lo largo de la trayectoria de avance del satélite. Sin embargo, los SAR poseen una resolución temporal baja y las imágenes son afectadas por el ruido speckle y la dispersión en la superficie(1).
Por otro lado, desde hace aproximadamente una década, surgió la idea de utilizar las señales de los Sistemas Globales de Navegación por Satélite (GNSS, Global Navigation Satellite Systems) reflejadas en la superficie de la tierra para aplicaciones de teledetección(3,4). En este nuevo concepto, un transmisor GNSS junto con un receptor capaz de procesar señales de oportunidad GNSS dispersadas sobre la superficie se convierte en un radar biestático capaz de estimar los parámetros geofísicos del terreno. Las principales limitaciones de la técnica GNSS-R están relacionadas con el bajo nivel de la señal dispersada y que las frecuencias y ancho de banda de las señales recibidas son fijas y están determinadas por los sistemas GNSS.
A medida que la superficie es más rugosa, otros puntos en la superficie en regiones distantes desde el punto especular son propensos a tener la orientación apropiada para redirigir la onda incidente hacia la antena del receptor, contribuyendo así a la potencia final recibida. Por lo tanto, la rugosidad de la superficie determina la zona de brillo, siendo esta zona la región del terreno de donde proviene la mayor fracción de la energía dispersada que llega al receptor. La zona de brillo es una elipse de semieje mayor a y semieje menor b, definidos según


siendo θE el ángulo de elevación del satélite, h la altura de la antena λ la longitud de onda de la señal incidente. Esta zona esta esquematizada en la figura 1, para distintos valores de apertura de antena U(θ,Φ).

Figura 1: Zonas de brillo para distintos parámetros del sistema.
En el marco de este esquema, cuando un satélite de la red GPS ilumina una superficie, se genera una señal dispersada que depende, principalmente, de dos aspectos: i) la geometría de la superficie; ii) las características dieléctricas de la misma. Teniendo en cuenta que siempre se trabaja con superficies reales, los perfiles de las mismas no se describen a través de funciones analíticas sino mediante parámetros estadísticos(5). Cuando se monitorea superficies sin vegetación (suelos desnudos) las características geométricas se definen a través de la altura rms de la superficie (s) y de la función de autocorrelación entre dos puntos de la misma (r(x,x')); comúnmente, esta función es una Gaussiana con media cero y una longitud típica, que es la longitud de correlación (l). En cuanto a las características dieléctricas de la superficie iluminada, puede darse una división en dos grandes subconjuntos: aquellos que tratan el medio como un dieléctrico homogéneo y aquellos que tienen en cuenta la aleatoriedad del mismo (debido a los poros de aire y agua). En este trabajo supondremos al medio como homogéneo, pero para dar una descripción más realista consideraremos que el medio subterráneo está estratificado. O sea, que existe una capa intermedia de espesor medio d con una constante dieléctrica ε1 y luego un medio semi-infinito definido por una constante dieléctrica ε2, como se esquematiza en la figura 2.
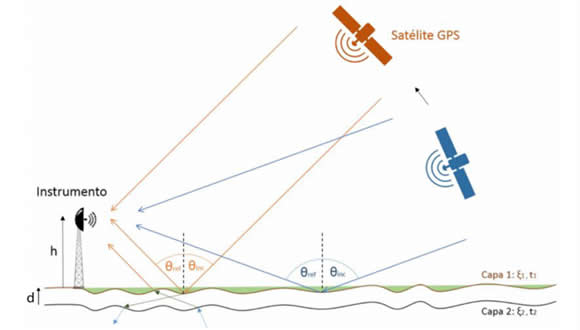
Figura 2: Representación del problema de interferencia que se analiza en este trabajo con el fin de estimar la constante dieléctrica del suelo ε.
Para aprovechar las señales de la red GPS con el objetivo de obtener la humedad del suelo, puede ser implementada la técnica del patrón de interferencia (IPT, Interference Pattern Technique)(6,7,8). El método consiste, sencillamente, en medir la suma coherente entre la señal directa enviada por el GPS y la señal dispersada en la dirección especular por la superficie iluminada. Esta suma coherente forma un patrón de interferencia que depende tanto de las propiedades geométricas como dieléctricas de la superficie. Además, como la señal está polarizada verticalmente, la interferencia presenta un mínimo (asociado al ángulo de Brewster - sería exactamente el ángulo de Brewster si la superficie fuese plana-) del cual se puede inferir el valor de la constante dieléctrica de la superficie. Al utilizar la flota de satélites GPS se debe llevar un control sobre la posición azimutal de los mismos. En trabajos previos las mediciones fueron realizadas utilizando satélites cuyas orbitas mantuvieran ángulos azimutales aproximadamente constantes, lo cual implica que la cantidad de mediciones por día es acotada (tantas como satélites con variación azimutal pequeña se tenga por día). Por ello, en este trabajo se desarrolló un método de automatización que permite seguir la trayectoria de cualquier satélite del sistema GNSS, eliminando la restricción de trayectorias con ángulo azimutal constante. Esta automatización, detallada en la Sección III, se realizó mediante el uso de un magnetómetro y un motor paso a paso como complemento de la antena y el receptor GPS.
Dado que la técnica IPT se basa en buscar el mínimo del patrón de interferencia, de ahora en más denominado como Notch, es fundamental contar con un modelo directo que calcule de primeros principios la señal a medir. En este trabajo utilizaremos los cálculos basados en el método de perturbaciones pequeñas (SPM, small perturbation method)(9,10,11) que, debido a su formulación y rango de validez, resulta apropiado para su uso en el contexto de la técnica IPT(12).
Este artículo está organizado de la siguiente manera: en la Sección II mostramos brevemente el cálculo del patrón de interferencia basado en SPM. Luego, en la Sección III describimos el arreglo experimental utilizado para adquirir las señales de GNNS y en la Sección IV damos el procesamiento de datos necesario para obtener el patrón de interferencia de las mediciones. En la Sección V mostramos los resultados obtenidos en las campañas de medición llevadas a cabo. Finalmente, la Sección VI contiene nuestras conclusiones y posibles lineamientos para mejorar los resultados obtenidos en este trabajo.
II. Cálculo del patrón de interferencia
El método de perturbaciones pequeñas (SPM) está basado en la hipótesis de que la superficie del suelo tiene una altura cuadrática media (altura rms, s) mucho menor a la longitud de onda de la señal incidente (λ). Concretamente, lo que se requiere es que ![]() (1,11). Usualmente, el método SPM también es usado el límite de su rango de validez, s ~ 0,05λ, produciendo resultados satisfactorios(9,10,13,14). En el caso de suelo desnudo y para el rango de microondas en banda L (λ= 25 cm), la condición de validez se cumple si la altura rms de la superficie cumple s < 1,25 cm, lo que es una hipótesis razonable para suelos de agricultura sin vegetación, en donde s ~ 1 cm(5,6,15).
(1,11). Usualmente, el método SPM también es usado el límite de su rango de validez, s ~ 0,05λ, produciendo resultados satisfactorios(9,10,13,14). En el caso de suelo desnudo y para el rango de microondas en banda L (λ= 25 cm), la condición de validez se cumple si la altura rms de la superficie cumple s < 1,25 cm, lo que es una hipótesis razonable para suelos de agricultura sin vegetación, en donde s ~ 1 cm(5,6,15).
La idea fundamental en el SPM es proponer ondas dispersadas y transmitidas con amplitudes desconocidas, las cuales se escriben como un desarrollo perturbativo. Por ejemplo, las amplitudes de orden cero corresponden a la reflexión de un plano; la amplitud de orden uno da cuenta de la dispersión difusa que se produce fuera de la dirección especular; la amplitud de orden dos muestra los efectos de dispersión múltiple que ocurren sobre la superficie: la onda incidente, luego de interactuar con un primer punto de la superficie es dispersada a un segundo punto en donde se refleja al espacio libre. Un resultado bien estudiado del SPM es que a segundo orden en las perturbaciones se verifica la conservación de la energía(11,13,14).
Para hallar estas amplitudes incógnita se plantean las condiciones de contorno sobre cada interfase que tenga la geometría del problema y se resuelve, orden a orden, un sistema lineal de ecuaciones para encontrar las amplitudes desconocidas. Si se considera que la superficie iluminada sólo tiene la interfase superior, el procedimiento para calcular los coeficientes incógnitas puede seguirse en(9,10). En cambio, si se considera un medio subterráneo estratificado, el cálculo detallado es dado en (16,17,13).
Basado en el SPM, la onda dispersada puede escribirse como(9,10,11)

siendo ![]() y
y ![]() las direcciones de la polarización horizontal y vertical de la onda dispersada. A segundo orden en las perturbaciones, la amplitud de la onda con polarización vertical resulta,
las direcciones de la polarización horizontal y vertical de la onda dispersada. A segundo orden en las perturbaciones, la amplitud de la onda con polarización vertical resulta,

con una expresión similar para la amplitud a. Los detalles del cálculo pueden leerse en(9,10,11) para medios sin estratificaciones ó en(13,16,17) si se consideran interfaces subterráneas.
Para obtener el patrón de interferencia producido en la antena se debe calcular el valor medio de la señal total medida. Como tratamos con una onda reflejada estocástica, debido a su interacción con la superficie aleatoria, el patrón de interferencia dependerá de las propiedades estocásticas de la superficie iluminada (i.e, su espectro de rugosidad W(k) -definida posteriormente-, su altura rms s y longitud de correlación l). Por consiguiente, debemos calcular la potencia media de la intensidad total, y luego normalizarla respecto a la amplitud de la onda incidente. Este cálculo queda planteado en la ecuación (5).

En (5), rA=(xA,zA) indica la posición de la antena. Para calcular el valor medio de la intensidad vamos a considerar que la superficie puede ser modelada como un proceso aleatorio estacionario e isótropo, con una distribución Gaussiana de alturas con media cero. Este tipo de procesos estocásticos tiene las siguientes propiedades:

En la última igualdad se define el espectro de rugosidad de la superficie, que consideraremos Gaussiana,

Usando las propiedades (I) y (II), la intensidad media del patrón de interferencia resulta en

La primera línea en (7) muestra que el patrón de interferencia es proporcional al coeficiente de Fresnel (dado esquemáticamente por ξ(0)). Como estamos usando un método de dispersión electromagnética basado en perturbaciones pequeñas, el término anterior no incluye correcciones por rugosidad, debido a que es la solución de orden cero. La rugosidad de la superficie aparece naturalmente en los términos de orden superior, los cuales son proporcionales al espectro de rugosidad W(k). Además, para superficies sin cultivos (en donde s ≈ 1 cm), los términos ξ(1)y ξ(2) resultan relevantes debido a que ellos tienen en cuenta los efectos de dispersión múltiple producidos en la superficie.
Concretamente, si se considera que la superficie es un plano, el patrón de interferencia se reduce a

que se reduce al modelo presentado en(6,7,8) pero sin el factor de rugosidad, que en estos modelos surge como un factor multiplicativo ad-hoc. Aquí, en cambio, los efectos de la rugosidad surgen naturalmente al plantear que la superficie dispersora es aleatoria.
III. Configuración experimental
Para estimar la constante dieléctrica del suelo estudiado mediante la técnica IPT se utilizó el armado experimental mostrado en las figuras 2 y 3. Este consta de una antena tipo ''patch", la cual fue caracterizada por Emanuel Moré en su tesis de Maestría en Instrumentos Satelitales realizada en CONAE (Córdoba)(18). La altura a la que se puede colocar la antena está limitada por el tiempo de coherencia entre la señal directa proveniente del GPS y la reflejada por el terreno. Este tiempo, tc, está definido como la diferencia de camino que recorren ambas señales, que depende de h, dividida por la velocidad de la luz. A su vez, el tiempo de chip que le permite a los receptores GPS comerciales seguir al satélite es![]() (19). Esto significa que la interferencia entre señal directa y reflejada puede ser detectada sólo si ambas señales llegan en un tiempo menor a τ. Para asegurarse una amplitud lo suficientemente grande en el patrón de interferencia se pide que tc < 0.5τ. Con esta condición se puede obtener la altura hmax máxima de la antena a partir de la ecuación
(19). Esto significa que la interferencia entre señal directa y reflejada puede ser detectada sólo si ambas señales llegan en un tiempo menor a τ. Para asegurarse una amplitud lo suficientemente grande en el patrón de interferencia se pide que tc < 0.5τ. Con esta condición se puede obtener la altura hmax máxima de la antena a partir de la ecuación

En la configuración presentada en este trabajo, hmax resulta 128 m. La antena fue montada sobre un trípode a una altura entre los 2,0 m y 3,5 m que está dentro del rango permitido y que posibilita un montaje mecánico sencillo, robusto, y direccionar la misma hacia el horizonte siguiendo la trayectoria del satélite seleccionado.
La antena se conectó mediante USB a la computadora utilizando un receptor GPS SparkFun Venus GPS(20).

Figura 3: a): Esquema de la antena tipo patch montada sobre el tripe durante las mediciones. b): Sensor Hydra Probe utilizado para medir la constante dieléctrica in-situ.
Este receptor GPS, de uso comercial, es capaz de decodificar la información contenida en la señal de banda L1. Esta señal proporciona qué satélites GPS están a la vista, sus posiciones angulares y las potencias con la que cada señal llega al receptor, entre otras cosas(21) . Para captar la señal es necesario conectar el receptor a una antena, que dada la técnica a utilizar debe poseer, en principio, las siguientes características: polarización lineal, patrón de radiación simétrico al menos en el plano de incidencia y en el intervalo de interés para el ángulo de incidencia, y frecuencia de sintonía lo más cercana posible a la que emite el sistema GPS, 1575,42 MHz. Según la caracterización(18), la antena utilizada cumple estos requisitos.
Dado que la técnica ITP se basa en medir la señal dispersada por el suelo en la dirección especular, la antena receptora debe estar orientada siempre al plano de incidencia de la señal GPS. Esta condición puede ser fácilmente satisfecha si la trayectoria de los satélites mantiene constante el ángulo azimutal. En este caso es suficiente orientar la antena una vez al inicio de las mediciones. Sin embargo, son pocos los satélites que tienen tales trayectorias. La mayoría de los GPS orbitan variando el ángulo azimutal. Por lo tanto, para utilizar la técnica IPT es necesario reorientar la antena hacia el plano de incidencia a lo largo de la trayectoria del satélite del cual se adquirirá el patrón de interferencia. Para cumplir con esta necesidad se desarrolló un sistema automatizado de reposicionamiento de la antena de adquisición.
La automatización se basó en comparar los datos de la posición del satélite, medidos en tiempo real por el receptor GPS, junto con los datos de posición de la antena, medidos con un magnetómetro de 3 ejes AK8963 integrado en el módulo MPU 9250(22). Luego de adquirir ambas posiciones, se calculaba su diferencia y si esta era mayor a la resolución del GPS, se movía la antena en azimut a través de un sistema conformado por un motor paso a paso modelo 28byj-48 y su controlador ULN2003(23,24). El módulo MPU 9250 y el motor paso a paso eran controlados y alimentados mediante una plaqueta ArduinoUNO. Los códigos del software final desarrollado para medir y seguir a los satélites, así como la descripción detallada de cada uno y su manual, se encuentran en el repositorio de Github del proyecto(25) .
En la figura 4 se muestra cómo se integraron todos estos componentes junto con la antena sobre el soporte mecánico. Este soporte se construyó utilizando una base de madera que se enroscaba en la parte superior de un trípode. A un costado de la base se incrustaron coaxialmente el motor paso a paso y un rulemán. Sobre el rulemán se apoyó un cilindro de plástico, dentro del cual se centró un eje de aluminio encastrado en el tabique del motor paso a paso a un extremo y hacia el otro sobre la base secundaria, en donde se ubicó el magnetómetro y la antena. Para evitar que el motor trabajara forzadamente, la base que sostenía la antena y el magnetómetro fue apoyada sobre el cilindro plástico, de forma tal que todo el peso de la antena recayera allí y no sobre el eje de aluminio conectado al motor. Además, como el magnetómetro estaba montado en la misma base que la antena, el eje x positivo del mismo apuntó siempre en la misma dirección que la antena, lo que permitió calcular el reposicionamiento de manera muy simple. Los componentes electrónicos (Arduino y controlador ULN2003) se fijaron a la base principal.
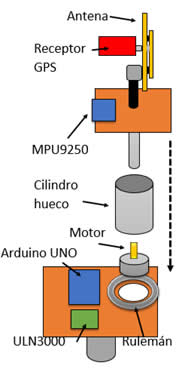
Figura 4: Modelo del ensamble del dispositivo armado para la automatización de la orientación de la antena.
Debe remarcarse que el magnetómetro siempre debió ser calibrado luego de la primera conexión, para eliminar el efecto de las tensiones parásitas que sufre al conectarse a una placa de computadora. Si no se calibraba correctamente, las mediciones adquirían un offset, aunque sin modificar las escalas. La forma de medir este offset, por ejemplo en el plano xy, era dar un giro completo en este plano y medir de forma constante la intensidad del campo magnético terrestre en las direcciones x e y de manera continua. En particular, se tomaron mediciones cada 100 ms mientras que los 360º se completaban en poco menos de un minuto. Luego se calculó el valor medio de las mediciones y se lo consideró a éste como el offset que luego fue eliminado de los ejes.
De esta manera se calibraron los ejes x y y (plano horizontal) ya que z (dirección vertical) se fijo paralelo al eje del motor. En la figura 5 se muestra las mediciones tomadas con el IMU antes y después de calibrarlas. Como el paso del motor es discreto y permite realizar movimientos prácticamente continuos en función del tiempo, al utilizar como fuente el campo magnético terrestre, la intensidad medida debía ser máxima hacia el norte. Calculando esta dirección mediante ![]() , la relación paso-ángulo debía ser lineal.
, la relación paso-ángulo debía ser lineal.

Figura 5: Comparación del ángulo barrido en una vuelta de 360º con el magnetómetro antes y después de calibrar.
La máxima resolución angular que se tuvo para cada satélite correspondió a 1º, que fue dada por el receptor GPS. Por otro lado, el motor realizaba un giro completo en 512 pasos, lo que representa una resolución angular de 360º/512 = 0,7º. Debido a esto, para evitar desfasajes durante el tiempo de adquisición, se mantenía el magnetómetro encendido y se contrastaba la posición de la antena con la del satélite. De esta forma se aseguraba que la posición relativa entre ambas difiriera menos de 3º (rango de tolerancia de error considerado como adecuado). Si la variación era mayor, se reorientaba a la antena automáticamente. Asimismo, si la variación era de 3º, se movía el motor 4 pasos (2,8º). Además, a fin de planificar las mediciones de forma óptima, se debía contar previamente con la trayectoria de los satélites de interés. Para ello se utilizó el software GPredict(26).
Por último, para comparar los valores de constante dieléctrica obtenidos mediante el estudio vía IPT se utilizó el sensor de humedad Hydra Probe (ver figura 3b). Mientras se adquiría el patrón de interferencia durante la pasada del satélite, se fue desplazando el sensor de humedad por la primer zona de Fresnel con el fin de contemplar la evolución temporal y heterogeneidad espacial de la constante dieléctrica.
Las mediciones se realizaron en Paseo de las Américas, en Ramsay 2100, CABA.
IV. Procesamiento de datos
Para obtener el valor de la constante dieléctrica (ε) a partir de los datos crudos se utilizó un algoritmo que permitía realizar un estudio estadístico sobre varios de los parámetros que caracterizan al patrón de interferencia teórico (alturas rms s, distancia entre interfaces d, altura de la antena ZA). El paso a paso del algoritmo se esquematiza en la figura 6.

Figura 6: Esquema del procesamiento de la señal GPS medida para obtener la constante dieléctrica del suelo ε.
En primer lugar se diseñó un filtro pasa bajos digital con el fin de reducir el ruido y el error de digitalización de la medición (ver figura 7). Para ello se trabajó con un filtro FIR (finite impulse response), mediante el método de ventana de Kaiser(27). La característica principal del filtro es una frecuencia de corte de 1,9 Hz. El código del filtro armado se encuentra en el repositorio de Github del proyecto(25). En la figura 7 se muestra un ejemplo de la señal de los datos crudos y su posterior filtrado. La señal GPS viene dada por la SNR (Signal to Noise Ratio), que es la relación entre la señal que la compone respecto a la señal de ruido que la corrompe.

Figura 7: Filtro pasa bajos aplicado sobre señal medida.
Luego de obtener varias señales filtradas, se procedió a estimar los parámetros que mejor ajusten a las mediciones mediante la simulación del patrón de interferencia basado en el SPM, dado por la ecuación (7).
Para realizar el análisis de las mediciones se generaron un conjunto de curvas teóricas, realizando un barrido denso en los parámetros de interés. El modelo de medios estratificados cuenta con ocho parámetros libres: {s1, l1, s2, l2,ε1, ε2, d, ZA}. Sin embargo, para alguno de estos parámetros se tienen restricciones biofísicas (alturas rms y longitudes de correlación) ó mediciones directas (altura de la antena).
Para suelos sin vegetación los valores físicamente posibles para l y s son, de 5 cm a 20 cm, y de 0,3 cm a 2,5 cm respectivamente(28). En todas las mediciones realizadas se encontró que los IP tienen características en común, correspondientes a l > 10 cm y s < 0,1 cm como se ve en la figura 8, lo que tiene sentido físico, ya que se tratan de terrenos más bien chatos. Además, para valores l > 10 cm la variación del patrón de interferencia no resulta significativa, por lo que en el algoritmo de inversión se fijó el valor en l = 15 cm para ambas interfaces. A su vez, se contó con la medición para la altura media de la antena (2,3 m), por lo cual se restringió el rango de valores para este parámetro entre 2,0 m y 2,6 m. Con lo cual, los parámetros libres del modelo, sobre los cuales se hicieron un barrido más denso fueron las constantes dieléctricas y la distancia media entre las interfaces.

Figura 8: Patrones de interferencia simulados según el modelo SMP-2 para distintos valores de l y s (expresados en metros).
Se generaron dos familias de curvas, una con valores altos y otra con valores bajos de constantes dieléctricas (que se corresponden a humedades altas y bajas, respectivamente). Los valores de parámetros utilizados para realizar las simulaciones fueron, para humedad baja,

Y para humedad alta,

Las mediciones contienen un offset que se calculó como el valor medio de los datos, y se lo restó a la intensidad. Además, para que sea comparable con las simulaciones, se escaló la señal según su desviación estándar. A las mediciones ya filtradas se les redujo la frecuencia de muestreo para poder compararlas punto a punto con las curvas generadas, y así calcular la desviación cuadrática media (DCM) entre ellas. En lugar de tomar la curva simulada que minimice este error, se tomó una cota máxima que admitiera un número adecuado de curvas que permitiera realizar un análisis estadístico sobre los parámetros de interés. De esta forma se tomó como ε1 y ε2 el valor promedio de todas las curvas simuladas que entren en el rango de DCM. El código utilizado para esta parte se encuentra en el repositorio de Github del proyecto(25).
V. Resultados
En la figura 9 se muestran los datos adquiridos utilizando el esquema experimental descripto en la Sección III. En esta figura se puede observar las variaciones en la posición azimutal del satélite seguido y la señal adquirida por la antena.

Figura 9: Datos crudos de una medición realizada con el sistema de adquisición automatizado.
Para obtener los valores de contante dieléctrica que mejor ajusten a las mediciones se determinaron cotas en el DCM de forma tal que las curvas coincidentes sean entre 70 a 100, tanto en el modelo de una interfase como en el de dos interfaces. En la figura 10 se muestran todas las curvas que quedaron dentro de la cota del DCM para dos de las mediciones. Las cotas utilizadas llegan hasta 1,5 dB. Las curvas son muy similares entre sí, y son una cantidad adecuada para hacer un análisis estadístico. Para el modelo de una sola interfase se puede ver en la figura 11 que las curvas no se ajustan tan bien a las mediciones.
Los resultados obtenidos para una serie de nueve mediciones se presentan en la Tabla 1 y en la figura 12.
Tabla 1: Comparación de los valores de e medidos con el sensor de humedad (in situ) y con la técnica del patrón de interferencia usando SPM-2 (IPT) para el modelo de una o dos interfaces. Los valores de ε1 y ε2 corresponden a la capa superior y la capa inferior.


Figura 10: En varios colores, se presentan las curvas que se tuvieron en cuenta para calcular los parámetros correspondientes al patrón de interferencia de la medición (curva azul).

Figura 11: En varios colores, se presentan solo algunas de las curvas que se tuvieron en cuenta para calcular los parámetros correspondientes al patrón de interferencia de la medición (curva azul).

Figura 12: Contraste entre valores simulados para 2 capas y valores medidos.
Con los valores de e de las curvas seleccionadas en función del DCM, se calculó su valor medio y su desviación estándar, y con ese resultado se estimó la constante dieléctrica del suelo. En las figuras 13, 14 y 15 se muestran los histogramas obtenidos para la medición tomada con el satélite prn 28.. En general, los resultados muestran histogramas con más de un valor importante, lo que se ve reflejado en los valores de la desviación estándar en cada caso. Una posible mejora para estos resultados podría darse con una grilla más densa en valores de ε1 y ε2 para generar curvas teóricas. A través de los histogramas correspondientes se estimaron valores de las alturas rms (s) y de la distancia media entre las interfaces (d). Además, en las figuras 160 y 17 se muestra la distribución conjunta para valores de ε1 y ε2 compatibles con los ajustes hechos sobre la misma medición.

Figura 13: Histograma sobre los valores de ε1 de las curvas que ajustan al modelo de una sola capa.

Figura 14: Histograma sobre los valores de ε1 de las curvas que ajustan al modelo de dos capas.

Figura 15: Histograma sobre los valores de ε2 de las curvas que ajustan al modelo de dos capas.
De los resultados correspondientes a los satélites prn 31 y prn 28 se observa que el valor de ε2 es el que se llega a medir con el sensor Hydra Probe al insertarlo de forma vertical en la superficie hasta introducir totalmente sus puntas. Para estas mediciones, los resultados de d concuerdan con la medida de las puntas del sensor, que es 5 cm. En el caso de las mediciones con los satélites prn 19, prn 17, prn 10 del 03/04/2019, los resultados de d casi duplican el alcance del sensor Hydra Probe, y se puede ver que el valor de ε2 medido in situ es menor al que se obtiene con el modelo de dos interfaces. Esto puede deberse a que, si no hubieron lluvias recientes, en el suelo los estratos más profundos son mas húmedos que los superiores, conservando el agua filtrada, por lo que las capas superiores funcionan como protección contra condiciones externas(29). Por lo tanto, con el sensor se obtienen valores de humedad menores a los que estima el modelo IPT de dos capas. Un contraste entre mediciones in-situ y la simulación de la segunda capa se puede observar en la figura 12.
En cuanto al modelo con una sola interface, se observa que el valor de ε en general concuerda con el ε1 del modelo de dos interfaces. Este valor también concuerda con el de ε1 obtenido en las dos mediciones en donde se realizó un análisis de la capa superficial con el sensor de humedad. En consecuencia, si bien el modelo teórico con una sola interface brinda información incompleta del terreno, en principio podría funcionar para obtener la constante dieléctrica superficial.
Respecto a la altura de la antena, haciendo un promedio de los resultados de cada ajuste se obtuvo que ZA = (2,3 +/- 0,2) m, compatible con el valor medido de forma directa de (2,32 +/- 0,04) m.

Figura 16: Gráfico de dispersión para el satélite prn28 donde el tamaño de cada punto es proporcional a la cantidad de curvas que ajustaron a la medición que tienen los valores de ε1 y ε2 correspondiente a los ejes.

Figura 17: Gráfico de dispersión para el satélite prn17.
VII. Conclusiones
En este trabajo se ha mostrado que es posible estimar la constante dieléctrica del suelo sin cultivos (suelos desnudos o con pasturas) utilizando señales de oportunidad GNSS y el método del patrón de interferencia. Debido a que la señal GNSS fue medida con un receptor comercial de GPS, es necesario realizar un pre-procesamiento de las mediciones para filtrar los ruidos generados por la frecuencia de muestreo del receptor.
A través de un modelo teórico para la dispersión electromagnética sobre superficies aleatorias se generó una gran familia de curvas para el patrón de interferencia, realizando un barrido denso en las variables biofísicas que lo definen (altura rms de las superficies y distancia media entre ellas, constantes dieléctricas y altura efectiva de la antena) en el rango deseado para cada parámetro. Luego, este conjunto de curvas se comparó con las mediciones usando como factor de control la desviación cuadrática media entre la curva teórica y la medición. Se eligió como cota para el DCM un valor tal que la cantidad de curvas comparables con la medición sea lo suficientemente grande como para realizar una buena estadística sobre los parámetros a obtener. De esta forma se pudo estimar la constante dieléctrica ε como el valor medio de los ε correspondientes a las curvas seleccionadas. Se ha mostrado en este trabajo que un buen modelo teórico del problema es el modelo basado en el método de perturbaciones pequeñas a segundo orden.
Considerando sólo una interfase presente en la superficie se pudo estimar la constante dieléctrica superficial, mientras que con un modelo de medios estratificados se logró obtener la constante dieléctrica de los dos estratos del suelo y la distancia media entre las dos superficies.
El hecho más destacable del trabajo realizado se debe a la automatización del sistema de adquisición. Los resultados presentados muestran que el dispositivo automatizado permitió seguir la trayectoria de los satélites, junto con el último armado experimental mejoraron sustancialmente la adquisición de los patrones de interferencia. Este dispositivo automatizado fue un gran avance para llevar a cabo las campañas de medición, ya que permitió reducir considerablemente los tiempos de medición.
Como mencionamos en la Introducción, esta técnica podría ser utilizada para inferir la humedad del suelo (a través de su relación con la constante dieléctrica del terreno) a escalas regionales. Para lograr tal objetivo debe tenerse en cuenta la posibilidad de replicar este modelo automatizado sobre antenas de mayor altura, lo que permitiría cubrir mayores zonas de brillo (i.e. escalas de suelo mayores, sobre zonas suficientemente homogéneas). Sin embargo, en nuestra opinión, la estrategia que consideramos más adecuada es la de replicar este mismo dispositivo y distribuir las nuevas antenas de forma estratégica para lograr la cobertura deseada. Con esta opción no resulta decisivo aumentar la altura de la antena (lo que podría ocasionar inconvenientes mecánicos o de montaje). En ambos casos se puede lograr ampliar la superficie sobre la cual se infiere el valor de la constante dieléctrica del terreno, sistema que presenta una gran ventaja ante el trabajo manual que conlleva el uso de sensores in-situ.
Finalmente, para mejorar la obtención de los parámetros biofísicos a través del método IPT, se deben generar curvas teóricas en intervalos de parámetros más amplios y con un grillado mucho más denso. Esto, sin embargo, genera un gran costo computacional debido al elevado número de parámetros libres en el modelo de dos capas. Asimismo, las mediciones in situ realizadas con el sensor Hydra Probe mejorarían de manera sustancial si, en lugar de incrustar en dirección vertical el sensor desde la superficie del terreno, se pudiera hacer una calicata y en ella introducir el sensor de manera horizontal. Esto permitiría medir con mayor precisión la constante dieléctrica para los distintos estratos del terreno y se podría, además, contar con una medición directa para los espesores de las capas subterráneas. Este último procedimiento estuvo fuera de alcance ya que en los predios en donde se tomaron las mediciones no estaba permitido modificar el terreno.
Agradecimientos
Este trabajo fue financiado por la Agencia Nacional de Promoción Científica y Tecnológica (PICT 2014 N° 0647) y CONICET. Agradecemos a Ubaldo Hereñú, técnico mecánico del IAFE, por el montaje del sistema de adquisición automatizado.
1. F. T. Ulaby, R. K. Moore, and A. K. Fung. Microwave remote sensing: active and passive. Vol. 2, Radar remote sensing and surface scattering and emission theory. Addison-Wesley Reading, MA, 1982. [ Links ]
2. I. H. Woodhouse. Introduction to microwave remote sensing. CRC press, 2017. [ Links ]
3. N. Rodriguez-Alvarez, X. Bosch-Lluis, A. Camps, M. Vall-Llossera, E. Valencia, J. F. Marchan-Hernandez, and I. Ramos-Perez. Soil moisture retrieval using GNSSR techniques: Experimental results over a bare soil field. IEEE Transactions on Geoscience and Remote Sensing, 47(11):3616-3624, 2009. [ Links ]
4. N. Rodríguez-Álvarez et al. Contributions to earth observation using gnss-r opportunity signals. PhD thesis, Universitat Politécnica de Catalunya, 2011. [ Links ]
5. M. E. Barber, F. M. Grings, J. Álvarez-Mozos, M. Piscitelli, P. A. Perna, and H. Karszenbaum. Effects of spatial sampling interval on roughness parameters and microwave backscatter over agricultural soil surfaces. Remote Sensing, 8(6):458, 2016. [ Links ]
6. J. Álvarez-Mozos, J. Casalí, M. González-Audícana, and N. E. Verhoest. Assessment of the operational applicability of RADARSAT-1 data for surface soil moisture estimation. IEEE Transactions on Geoscience and Remote Sensing, 44(4):913-924, 2006. [ Links ]
7. A. Alonso-Arroyo, A. Camps, A. Aguasca, G. Forte, A. Monerris, C. Rüdiger, J.P. Walker, H. Park, D. Pascual, and R. Onrubia. Improving the accuracy of soil moisture retrievals using the phase difference of the dual-polarization GNSS-R interference patterns. IEEE Geoscience and Remote Sensing Letters, 11(12):2090-2094, 2014. [ Links ]
8. A. Alonso-Arroyo et al. Contributions to land, sea, and sea ice remote sensing using GNSS-reflectometry. PhD thesis, Universitat Politècnica de Catalunya, 2016. [ Links ]
9. J. T. Johnson. Third-order small-perturbation method for scattering from dielectric rough surfaces. JOSA A, 16(11):2720-2736, 1999. [ Links ]
10. M. A. Demir and J. T. Johnson. Fourth-and higher-order small-perturbation solution for scattering from dielectric rough surfaces. JOSA A, 20(12):2330-2337, 2003. [ Links ]
11. L. Tsang and J. A. Kong. Scattering of electromagnetic waves, advanced topics, volume 26. John Wiley & Sons, 2004. [ Links ]
12. M. Franco, E. More, E. Roitberg, F. Grings, E. Piegari, V. Douna, and P. Perna. Analysis of the Effect of Soil Roughness in the Forward-Scattering Interference Pattern Using Second-Order Small Perturbation Method Simulations. IEEE Geoscience and Remote Sensing Letters, 16(5):692-696, 2018. [ Links ]
13. M. A. Demir, J. T. Johnson, and T. J. Zajdel. A study of the fourth-order small perturbation method for scattering from two-layer rough surfaces. IEEE Transactions on Geoscience and Remote Sensing, 50(9):3374-3382, 2012. [ Links ]
14. J. T. Johnson and J. D. Ouellette. Polarization features in bistatic scattering from rough surfaces. IEEE Transactions on Geoscience and Remote Sensing, 52(3):1616-1626, 2014. [ Links ]
15. N. E. Verhoest, H. Lievens, W. Wagner, J. Álvarez-Mozos, M. S. Moran, and F. Mattia. On the soil roughness parameterization problem in soil moisture retrieval of bare surfaces from synthetic aperture radar. Sensors, 8(7):4213-4248, 2008. [ Links ]
16. A. Tabatabaeenejad and M. Moghaddam. Bistatic scattering from three-dimensional layered rough surfaces. IEEE Transactions on Geoscience and Remote Sensing, 44(8):2102-2114, 2006. [ Links ]
17. H. Zamani, A. Tavakoli, and M. Dehmollaian. Second-order perturbative solution of cross-polarized scattering from multilayered rough surfaces. IEEE Transactions on Antennas and Propagation, 64(5):1877-1890, 2016. [ Links ]
18. E. Moré. Estudio y aplicación del uso de señales de oportunidad GNSS para estimar la humedad del suelo. Master's thesis, Universidad Tecnologica Nacional, Facultad Regional de Mendoza, 2017. [ Links ]
19. SkyTraq Technology, Inc. SparkFun Venus GPS received. https://cdn.sparkfun.com/datasheets/Sensors/GPS/Venus/638/doc/Venus638FLPx_DS_v07.pdf. [ Links ]
20. Descripción módulo SparkFun. https://www.sparkfun.com/products/retired/11058, 2019. Accedido : 2019-12-10. [ Links ]
21. NMEA data. www.gpsinformation.org/dale/nmea.htm, 2019. Accedido : 2019-12-10. [ Links ]
22. MPU-9250 data. https://www.invensense.com/wp-content/uploads/2015/02/PS-MPU-9250A-01-v1.1.pdf, 2016. Accedido: 2019-12-10. [ Links ]
23. Motor 28BYJ-48 data. http://robocraft.ru/files/datasheet/28BYJ-48.pdf, 2015. Accedido : 2019-12-10. [ Links ]
24. Controlador ULN2003 data. http://www.tij.co.jp/jp/lit/ds/slrs027o/slrs027o.pdf, 2019. Accedido: 2019-12-10. [ Links ]
25. Reposito de códigos del proyecto. https://github.com/arellana/TeledeteccionIAFE.git, 2019. [ Links ]
26. Software Gpredict. www.gpredict.oz9aec.net/, 2019. Accedido: 2019-12-10. [ Links ]
27. M. Wickert. Lecture notes Introdution to signal and systems. College of Engineering and Applied Science, University of Colorado, 2015. [ Links ]
28. M. E. Barber. Parametrización y optimización de modelos de inversión para la obtención de humedad del suelo a partir de datos satelitales de Radares de Apertura Sintética. PhD thesis, Universidad de Buenos Aires. Facultad de Ciencias Exactas y Naturales, 2013. [ Links ]
29. J. Behari. Microwave dielectric behaviour of wet soils, volume 8. Springer Science & Business Media, 2006. [ Links ]

