











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkI. INTRODUCCIÓN
El método de medición de error de foco utilizando un haz de luz astigmático [1,2] se utiliza ampliamente debido a su fácil operación, alta sensibilidad y bajo costo. Actualmente, el mismo se incorpora en los diseños de la mayoría de los cabezales de lectoras y grabadoras de CD, DVD y Blu-Ray, y existe un gran número de aplicaciones en ciencia entre las cuales pueden destacarse los sistemas de medición de desplazamientos lineales y angulares [3], perfilometría [4-6], medición de espesores [7], interferometría [8], acelerómetros [9], medición de propiedades térmicas [10] y los desarrollos del grupo para la caracterización de la absorción de óptica utilizada para láseres de muy alta potencia [11-13].
El sistema puede dividirse en 4 etapas: 1-Láser de prueba, 2-Óptica de enfoque, 3-Detector y 4Generador de la señal de error de foco. El láser de prueba utilizado posee un perfil gaussiano que puede ser elíptico y astigmático o circular y su astigmatismo generarse en la etapa 2 por medio de la utilización de al menos una lente cilíndrica. La longitud de onda (λ Prueba ) del láser de prueba es elegida en función de las propiedades ópticas de la muestra y dependiendo de si el sistema se construye para la medición por transmisión [11-13] o por reflexión [10].
Así mismo, la etapa 2 depende del sistema de medición deseado y en su diseño se busca lograr que el haz se enfoque sobre el detector a un tamaño determinado por las dimensiones del mismo. En la etapa 3, típicamente se utiliza un detector de cuatro cuadrantes para medir la variación del perfil de intensidad del haz astigmático. Este detector está conformado por un arreglo de cuatro fotodiodos idénticos (C1, C2, C3 y C4) dispuestos uno en cada cuadrante de un sistema de ejes cartesianos. Existen variantes que utilizan una cámara CCD [7] de forma análoga a un detector de cuatro cuadrantes simplemente particionado las imágenes adquiridas en cuatro cuadrantes elegidos convenientemente. Si bien, en algunos casos, esto facilita el sistema óptico cuando se desea observar la muestra en simultaneo con la medición de desenfoque y permite independizarse de la orientación del detector respecto a la orientación del haz astigmático, esto posee la desventaja de que el sistema de detección se vuelve más lento debido a los tiempos de adquisición de la cámara y la necesidad de postprocesamiento. La señal detectada es denominada señal de error de foco y se compone a partir de la señal de tensión proveniente de cada uno de los cuadrantes, mediante el cálculo del desbalance en las diagonales (C1+C3)-(C2+C4). Este cálculo es realizado en la etapa 4 ya sea por medio de amplificadores operacionales [13] o mediante la digitalización de cada canal y el postprocesamiento.
La mayoría de las aplicaciones utilizan configuraciones heredadas del diseño incorporado en los cabezales comerciales, cuyo principal objetivo es la minimización de la cantidad de elementos ópticos para la reducción de costos y espacio, dejando en último lugar a la sensibilidad como una magnitud a maximizar bajo estas restricciones, siempre y cuando se satisfagan los requerimientos de un sistema determinado. Por otra parte, si bien la base de funcionamiento del método es muy conocida sigue habiendo una falta de consenso en cuanto a la elección óptima de los parámetros y se han realizado trabajos de maximización de la sensibilidad del sistema para diversas configuraciones [11,12,14,15].
En la Sección II se discute el formalismo para la construcción de una simulación numérica, basada en matrices de rayos ABCD para haces gaussianos [16], que permite el cálculo de la sensibilidad del sistema medición de error de foco como función de sus parámetros constructivos. A diferencia de las configuraciones utilizadas en la mayoría de las aplicaciones, la configuración propuesta corresponde al caso de un haz gaussiano circular cuyo astigmatismo es generado en la etapa 2 a partir del uso de dos lentes cilíndricas idénticas, dado que posee la ventaja de tener un mayor control de los parámetros del sistema. En la Sección III se presenta el procedimiento seguido para el diseño del sistema de medición de error de foco utilizado en un trabajo previo de este grupo [12], con el objetivo de mostrar el comportamiento de las ecuaciones presentadas en la Sección II. Finalmente, en la Sección IV, se presentan las conclusiones generales del trabajo y se detallan consideraciones prácticas a tener en cuenta para el diseño de un sistema de medición de error de foco.
II. FORMALISMO
Configuraciones desacopladas
La Fig. 1 muestra esquemas básicos del sistema de medición por reflexión y por transmisión (caso haz gaussiano circular). La medición por reflexión es utilizada cuando se desea conocer el apartamiento de una muestra a lo largo del eje normal a su superficie, como es el caso de los sistemas de control de foco automatizado. Por otra parte, la medición por transmisión no es sensible a dicho apartamiento sino al gradiente del índice de refracción de la muestra, una magnitud controlada en los sistemas de medición por lente térmica [12,13]. Para el caso por reflexión (Fig. 1a), el haz previamente colimado se refleja primero en el semiespejo SE1 y se enfoca mediante la lente L1 sobre la superficie altamente reflectante de la muestra (a λ
Prueba
) de la cual se desea conocer su posición Z1. La porción del haz de prueba reflejada sobre la superficie es colectada por la lente L1 y dirigida a un sistema de lentes cilíndricas L
Cx
y L
Cy
luego de atravesar el semiespejo SE1. En esta etapa el sistema se vuelve idéntico al de transmisión (Fig. 1b) que alcanza las lentes cilíndricas luego de atravesar una muestra con coeficiente de transmisión alto a λ
Prueba
. El haz de prueba utilizado posee un perfil gaussiano circular, pero mediante el uso de las lentes cilíndricas L
Cx
y L
Cy
, cuyos ejes son colocados perpendiculares entre sí, se lo vuelve astigmático. De esta forma, colocando el detector de cuatro cuadrantes (4Q) con sus ejes  a 45◦ respecto a los ejes de las lentes cilíndrica
a 45◦ respecto a los ejes de las lentes cilíndrica  es posible medir el desenfoque del haz de prueba en la posición del detector.
es posible medir el desenfoque del haz de prueba en la posición del detector.
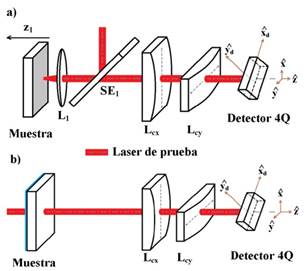
FIG. 1: Esquemas básicos del sistema de medición de error de foco (a) por reflexión y (b) por transmisión.
La Fig. 2 muestra un ejemplo de la variación del perfil de intensidad de un haz astigmático sobre el detector de cuatro cuadrantes y la señal de error de foco (FE, por sus siglas en inglés) normalizada por la señal suma (C1+C2+C3+C4), como se expresa en la Ec. (1). Se grafica en función de la dirección de propagación z de dicho haz, normalizada por el parámetro Z
R
(rango de Rayleigh), para un caso particular de astigmatismo simétrico. En este trabajo se denomina astigmatismo simétrico cuando los radios mínimos de cada eje de la elipse (cinturas W
c
) del haz gaussiano en las direcciones  e
e  son iguales y asimétrico cuando no lo son.
son iguales y asimétrico cuando no lo son.
 (1)
(1)Como puede observarse en la Fig. 2, en este caso particular que se obtiene al desplazar el detector en la dirección de propagación  , la antisimetría del perfil de intensidad del haz respecto a la posición z = 0 (haz circular) se traduce en una señal FE antisimétrica que pasa por cero en dicha posición, dado que todos los cuadrantes se igualan. Nótese además que a medida que z aumenta en cualquiera de las direcciones, la señal FE va tendiendo a cero nuevamente dado que las elipses comienzan a sobresalir del área del 4Q, llegando a llenarlo por completo. En los esquemas de la Fig. 1 el detector se mantiene fijo y lo que produce el cambio del perfil de intensidad sobre el detector es el desenfoque debido ya sea a un corrimiento Z1 (para el caso de reflexión) o a la variación del índice de refracción (para el caso de transmisión). La pendiente de la zona lineal alrededor de la posición de desenfoque 0 (resaltada con una línea de trazos en la Fig. 2) determina la sensibilidad del sistema, por lo que su maximización es fundamental. El problema se vuelve complejo si el astigmatismo no es simétrico, algo común en muchos sistemas debido a la incorporación de, por ejemplo, sistemas ópticos intermedios o sistemas de barrido que obligan a alejar los componentes del sistema de medición de error de foco.
, la antisimetría del perfil de intensidad del haz respecto a la posición z = 0 (haz circular) se traduce en una señal FE antisimétrica que pasa por cero en dicha posición, dado que todos los cuadrantes se igualan. Nótese además que a medida que z aumenta en cualquiera de las direcciones, la señal FE va tendiendo a cero nuevamente dado que las elipses comienzan a sobresalir del área del 4Q, llegando a llenarlo por completo. En los esquemas de la Fig. 1 el detector se mantiene fijo y lo que produce el cambio del perfil de intensidad sobre el detector es el desenfoque debido ya sea a un corrimiento Z1 (para el caso de reflexión) o a la variación del índice de refracción (para el caso de transmisión). La pendiente de la zona lineal alrededor de la posición de desenfoque 0 (resaltada con una línea de trazos en la Fig. 2) determina la sensibilidad del sistema, por lo que su maximización es fundamental. El problema se vuelve complejo si el astigmatismo no es simétrico, algo común en muchos sistemas debido a la incorporación de, por ejemplo, sistemas ópticos intermedios o sistemas de barrido que obligan a alejar los componentes del sistema de medición de error de foco.
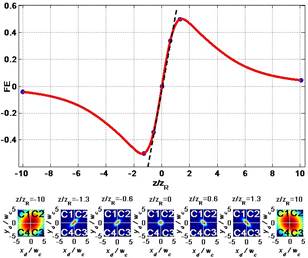
FIG. 2: Esquema típico de la señal FE (Ec. (1)) obtenida en un detector de cuatro cuadrantes cuando se barre un haz astigmático simétrico en su dirección de propagación  . Los mapas de la parte inferior representan el perfil de intensidad del haz sobre el detector en los puntos marcados en azul sobre la señal FE. La distancia de propagación z se encuentra normalizada por ZR (rango de Rayleigh) y las coordenadas del detector (xd, yd), se normalizan por el tamaño de la cintura del haz Wc.
. Los mapas de la parte inferior representan el perfil de intensidad del haz sobre el detector en los puntos marcados en azul sobre la señal FE. La distancia de propagación z se encuentra normalizada por ZR (rango de Rayleigh) y las coordenadas del detector (xd, yd), se normalizan por el tamaño de la cintura del haz Wc.
Propagación del haz de prueba
Para estudiar la sensibilidad de los sistemas de medición de error de foco es necesario conocer cómo varía la señal FE en función de los parámetros del sistema. Esta señal dependerá de las integrales de superficie de la intensidad I que llegue a cada cuadrante. A partir de la Ec. (1) esto resulta:
 (2)
(2)Para un modo gaussiano elíptico se tiene que la intensidad puede ser escrita como:
 (3)
(3)donde se incluye un prefactor de forma que la intensidad total del haz es normalizada a 1 y, dado que las integrales de la Ec. (2) se realizan sobre la superficie de cada cuadrante del detector, las coordenadas (x, y) del sistema óptico son transformadas a coordenadas sobre el detector (xd, yd) rotado 45◦.
Los parámetros Wx y Wy en la Ec. (3) son los radios de cada eje de la elipse, donde la intensidad cae a 1/e2 del valor máximo y pueden ser calculados a partir de los parámetros gaussianos complejos qx y qy de las direcciones  e
e  , respectivamente, como se indica en la Ec. (4).
, respectivamente, como se indica en la Ec. (4).
 (4)
(4)siendo k0 el número de onda, R
s
el radio de curvatura del haz y  el complejo conjugado de q
s
. En particular, los valores mínimos alcanzados por W
x
y W
y
(cintura del haz) se denotan como W
Cx
y W
Cy
, respectivamente.
el complejo conjugado de q
s
. En particular, los valores mínimos alcanzados por W
x
y W
y
(cintura del haz) se denotan como W
Cx
y W
Cy
, respectivamente.
El problema parte entonces del cálculo de los parámetros q r del haz en la posición del detector para cada eje por separado, para luego computar las integrales de la Ec. (2). En particular estas integrales deben ser calculadas considerando que los detectores de cuatro cuadrantes poseen una longitud finita y gaps que separan los diversos cuadrantes, mayormente en el centro, lo cual reduce su eficiencia.
Mediante el uso de las matrices de rayos ABCD para haces gaussianos [16], es posible resolver la propagación del haz de prueba que atraviesa cada uno de los sistemas de medición de la Fig. 1 bajo la aproximación paraxial y obtener los parámetros q r en la posición del detector de cuatro cuadrantes. Esto permite simular la señal FE para diversas configuraciones y obtener la sensibilidad del sistema en cada caso.
La Fig. 3a muestra un esquema de la propagación de los haces a través del sistema óptico para el caso de medición por reflexión. La misma corresponde a una adaptación de la Fig. 1a donde solo se representa el haz de prueba reflejado para un caso enfocado y uno desenfocado. El haz de prueba posee un parámetro gaussiano q1 en la posición focal objeto de la lente L1, ubicada a una distancia f1 hacia la izquierda de la misma. Esta es la posición de foco de la muestra (Z1 = 0), por lo que el haz reflejado posee igual parámetro gaussiano q1 en la misma posición. Luego de atravesar la lente L1, la cintura del haz se ubica en la posición focal imagen, ubicada a una distancia f1 hacia la derecha de la misma, con un parámetro gaussiano q0. A partir de allí el haz se propaga libremente una distancia f+δ
0-D
z
para el eje , o f+δ0+Dz para el eje . Cada lente cilíndrica de distancia focal f enfoca al haz, que luego se propaga una distancia f+Z
det
+D
z
para el eje o f+Z
det
-D
z
para el eje . La posición Zdet corresponde al plano donde los radios Wx y Wy del haz, de parámetros gaussianos qx y qy en los ejes e , se hacen iguales para el caso Z1 = 0. Esto conlleva a un perfil de intensidad circular que anula la señal FE.

FIG. 3: Esquema de propagación del haz de prueba para el caso de (a) reflexión y (b) transmisión. La referencia de colores indica, en ambas figuras, el camino de los haces enfocados o desenfocados, en cada dirección, por (a) un desplazamiento de la muestra Z1 o (b) la inducción de una lente térmica LT.
Si la muestra se aleja de la posición de foco ( ), la reflexión del haz de prueba se desenfoca, trasladándose su cintura una distancia 2Z1 y manteniendo el parámetro gaussiano q1 debido a la superficie especular de la muestra. Luego al atravesar la lente L1 éste se enfoca a una distancia Z0r de la distancia focal imagen de dicha lente con parámetro gaussiano q0r. Este desplazamiento produce un cambio en el perfil de intensidad sobre el detector de cuatro cuadrantes, lo cual es parametrizado a partir de la señal FE.
), la reflexión del haz de prueba se desenfoca, trasladándose su cintura una distancia 2Z1 y manteniendo el parámetro gaussiano q1 debido a la superficie especular de la muestra. Luego al atravesar la lente L1 éste se enfoca a una distancia Z0r de la distancia focal imagen de dicha lente con parámetro gaussiano q0r. Este desplazamiento produce un cambio en el perfil de intensidad sobre el detector de cuatro cuadrantes, lo cual es parametrizado a partir de la señal FE.
Análogamente, la Fig. 3b muestra un esquema de la propagación de los haces a través del sistema óptico para el caso de medición por transmisión. El haz de prueba incide sobre la muestra con parámetro gaussiano q0. Para el caso en que no existe un gradiente de índice de refracción, el haz se propaga de manera equivalente al caso de la Fig. 3a con Z1 = 0. Por otra parte, si se genera dicho gradiente, por ejemplo, mediante la inducción de una lente térmica (LT) con distancia focal fgn, como en [12, 13], esto afectará el haz que atraviesa la muestra enfocándolo a una distancia Z0t de la superficie incidida con un parámetro gaussiano q0t. Nuevamente, este desenfoque conllevará a un cambio en el perfil de intensidad del haz que alcanza el detector de cuatro cuadrantes modificando la señal FE.
Equivalencia de las configuraciones
El problema de estudio de la sensibilidad del sistema para la medición de error de foco por reflexión o por transmisión para un parámetro gaussiano común q0, resulta equivalente si se considera el cambio de variables que iguala los parámetros:
 (5)
(5)Es decir que se busca la transformación que hace que ambos sistemas den como resultado que un mismo haz se enfoca en una posición idéntica y con el mismo parámetro gaussiano, antes de atravesar las lentes cilíndricas.
Para calcular la posición Z0r y el parámetro q0r consideremos la matriz de rayos que describe la propagación hasta dicho punto. Esto es:
 (6)
(6)De manera análoga, para calcular Z0t y q0t consideremos la matriz de rayos hasta este punto:
 (7)
(7)De forma general se tiene que un haz que ingresa con un parámetro gaussiano qin, a un sistema óptico descripto por la matriz de rayos ABCD, emerge del mismo con parámetro qout el cual transforma como [16]:
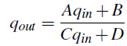 (8)
(8)De esta manera, los parámetros complejos gaussianos de los casos de estudio resultan:
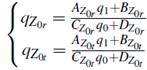 (9)
(9)donde Re(q0) = Re(q1) = 0 (parte real) por tratarse de parámetros gaussianos donde el haz se encuentra enfocado (Radio de curvatura R → ∞ ).
Si se repite esta condición de parte real nula para q0r y q0t, para hallar las posiciones donde el haz se enfoca nuevamente, se obtiene:
 (10)
(10)que se satisfacen para:
 (11)
(11)A su vez en estas posiciones, los parámetros complejos gaussianos resultan:
 (12)
(12)En particular para Z0r = 0 se tiene:
 (13)
(13)Por lo que, reemplazando la Ec. (13) en (12) y (11) puede verse que la equivalencia entre los problemas se tiene para el cambio de variables:
 (14)
(14)Finalmente, la matriz del sistema completo que considera el haz llegando hasta el detector de cuatro cuadrantes puede escribirse para ambos casos (transmisión y reflexión) como:
 (15)
(15)donde el signo superior corresponde a la dirección ˆx y el signo inferior a la dirección ˆy. Siendo:
 (16)
(16)y la posición Zdet es donde Wx = Wy (o análogamente W2x = W2y ) para el caso Q = 0, que a partir de las Ecs. (4) y (8), con qin = q0 y qout = qx, se obtiene:
 (17)
(17)Reemplazando los elementos de la matriz de la Ec. (16), la Ec. (17) se satisface cuando:
 (18)
(18)que tiene como posibles soluciones:
 (19)
(19)
 (20)
(20)
 (21)
(21)siendo la solución en Ec. (19) la correspondiente al caso trivial en que no hay astigmatismo. La solución en Ec. (20) corresponde al caso de astigmatismo simétrico donde las cinturas del haz en las direcciones ˆx e ˆy son iguales (Wcx = Wcy). Las soluciones en Ec. (21) corresponden al caso de astigmatismo asimétrico donde dichas cinturas son diferentes  . Esta diferencia provoca que la divergencia en uno y otro eje sean diferentes lo cual conlleva a la existencia de dos soluciones, entre las posiciones focales del haz en uno y otro eje, y que carece de utilidad para este estudio dada la magnitud de los valores que puede alcanzar, dependiendo de los parámetros |q0|, f, δ
0 y D
z
que se utilicen.
. Esta diferencia provoca que la divergencia en uno y otro eje sean diferentes lo cual conlleva a la existencia de dos soluciones, entre las posiciones focales del haz en uno y otro eje, y que carece de utilidad para este estudio dada la magnitud de los valores que puede alcanzar, dependiendo de los parámetros |q0|, f, δ
0 y D
z
que se utilicen.
Simulación numérica
Conocida la posición del detector Z det en función de los parámetros |q0|, f, δ 0 y D z y los radios W x y W y en función de los parámetros |q0|, f, δ 0, D Z y Q, es posible calcular las integrales de la Ec. (2) en forma numérica, teniendo en cuenta la geometría del detector. La integral numérica de FE es expresada como sumatoria en la Ec. (22). Estas sumatorias se realizan a lo largo de cada cuadrante de coordenadas x d(m) , y d(l) discretizadas con un paso ∆ det en los intervalos [x d( − mmax ), x d(mmax )] y [y d( − lmax ), y d(lmax )], respectivamente. Los gaps intermedios entre los cuadrantes del detector son considerados asignado a cada punto (x d(m) , y d(l) ), un peso igual a p (m,l) = 1 si se encuentra dentro de un cuadrante o de p (m,l) = 0 si se encuentra dentro de un gap.
 (22)
(22)donde:
 (23)
(23)y el denominador es la señal compuesta por la suma total de los cuatro cuadrantes:
 (24)
(24)La sensibilidad del sistema estará determinada por la pendiente del gráfico de señal FE (Ec. (2)) vs Q (Ec. (14)) alrededor de Q = 0. Ésta pendiente dependerá de los parámetros |q0|, f, δ 0 y D z y se calcula como:
 (25)
(25)En este trabajo, la sensibilidad es calculada numéricamente a partir de la interpolación lineal de la expresión para FE en la Ec. (22) evaluada en un entorno de Q = 0 para un conjunto discreto de valores de Q. La elección particular de los parámetros |q0|, f, δ 0, D z y Q dependerá del caso de estudio.
II. CASO DE ESTUDIO
En [12] se utiliza un sistema de medición por transmisión (véase Fig. 1b), empleando un láser HeNe que emite un modo gaussiano circular de longitud de onda λ = 632.8 nm. En ese caso el parámetro Q corresponde a la lente térmica inducida por un segundo láser (bombeo) concéntrico con el de láser de prueba. Este láser calienta localmente la muestra generando un gradiente del índice de refracción que enfoca el láser de prueba. La resolución espacial esperada para el barrido conlleva a una cintura del haz de prueba enfocado en la posición de la muestra de W0 = 23 µm lo que lleva a un valor |q0| ≃ 2.6 mm. Por otra parte, la geometría y dimensiones del detector de cuatro cuadrantes utilizado se representan en el mapa de la Fig. 4. Dicho detector posee un gap entre cuadrantes de 13 µm, un gap central de 65 µm y un tamaño aproximado de 503 µm × 503 µm por cada cuadrante. La distancia focal de las lentes cilíndricas se eligió buscando que el radio del haz, en la posición del detector, sea de dimensiones comparables a la de los cuadrantes para el caso δ 0 = D Z = 0, resultando en f = 75 mm. De esta manera, habiéndose prefijado los valores de |q0| y f, la sensibilidad del sistema solo dependerá de los parámetros δ 0 y D Z .
A su vez, el mapa de la Fig. 4 es utilizado en la simulación numérica correspondiendo a las posiciones en las que el algoritmo desarrollado calcula la intensidad del haz en las coordenadas del detector de cuatro cuadrantes. El paso elegido para la coordenada espacial en cada dirección del detector es ∆ det = 1 µm.

FIG. 4: Mapa de coordenadas del detector de cuatro cuadrantes utilizado para el cálculo de las integrales de la ecuación (2). La imagen mostrada posee un paso 10 veces mayor al utilizado para permitir apreciar el reticulado.
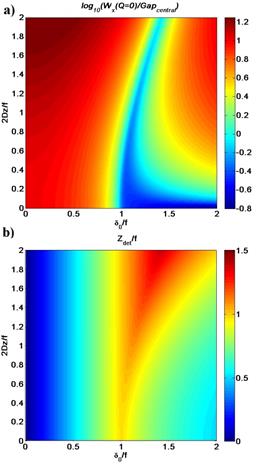
FIG. 5: Mapas en función del espacio de coordenadas (2Dz/f, δ0/f), definidas en la Fig. 3, de (a) Wx adimensionalizado por el tamaño del gap central (escala logarítmica) y (b) posición donde se coloca el detector de cuatro cuadrantes normalizada por f, Soluciones de interés de la Ec. (18).
Los valores de W x en el detector para Q = 0 (W x = W y , ver Ec. (17)) son presentados en forma de mapa en la Fig. 5a adimensionalizados por el valor del tamaño medio del gap central (65 µm) del detector (en escala logarítmica) y en función de las variables normalizadas 2D z /f (distancia total entre las lentes cilíndricas) y δ 0/f.
La Fig. 5b muestra un mapa de las soluciones de interés de la Ec. (18) normalizadas por f (Z det /f) nuevamente para el espacio de coordenadas (2D z /f, δ 0/f). A lo largo de este estudio el parámetro D z fue barrido entre 0 y f con pasos de f/300 y el parámetro δ 0 entre 0 y 2f con pasos de f/150.
Como puede observarse en la Fig. 5a, W x puede tomar valores de aproximadamente un orden de magnitud menor que el tamaño del gap central. Este hecho afecta considerablemente a la señal suma (S suma , ver Ec. (24)), dado que en el interior del gap la misma se anula. Por otra parte, la Fig. 5b permite conocer la posición donde debe colocarse el detector de cuatro cuadrantes para una dada configuración. Puede observarse que para δ 0/f<1 , esta posición es independiente de la distancia entre las lentes cilíndricas, mientras que para δ 0/f>1 , comienza a verse una dependencia con dicha distancia que se hace más relevante a medida que la misma crece.
La Fig. 6 muestra una comparación de los mapas de la señal S suma en el espacio de coordenadas (2D z /f, δ 0/f) para el caso en que el gap es considerado (Fig. 6a) y para el caso en que no (Fig. 6b). Puede observarse que en el caso que el gap es considerado, la señal S suma toma valores mínimos cuando W x es menor que el tamaño del gap, mientras que cuando no es considerado, la misma toma valores máximos (cercanos a log10(1)=0 por la normalización).

FIG. 6: Mapas en función del espacio de coordenadas (2Dz/f, δ0/f), definidas en la Fig. 3, de la señal Ssuma en escala logarítmica para el caso (a) considerando los gaps del detector (b) sin considerarlos.
Finalmente, para estudiar la sensibilidad del sistema se realizó el cálculo numérico de la señal FE a partir de la Ec. (22), barriendo los parámetros D z y δ 0 como se indicó anteriormente y el parámetro Q entre -10 m−1 y 10 m−1 con pasos de 2 m−1.
La Fig. 7 muestra la comparación de los mapas de los valores alcanzados por el valor absoluto de la derivada (sensibilidad del sistema) de la Ec. (25), nuevamente para los casos con gaps (Fig. 7a) y sin gaps (Fig. 7b). Puede observarse que los valores alcanzados por la derivada considerando el gap son superiores al caso sin gap en la región donde el haz comienza a ser menor que el tamaño del gap central (ver Fig. 5a). Esto se debe a que el centro del detector de cuatro cuadrantes, funciona como un pinhole que afecta a la señal S suma (ver Fig. 6a) y vuelve más sensible al sistema ante variaciones de la forma del haz. Si bien este hecho presenta una mejora en la sensibilidad del sistema, obliga a un aumento de la potencia del haz de prueba dado que la señal suma decae en esa misma región.
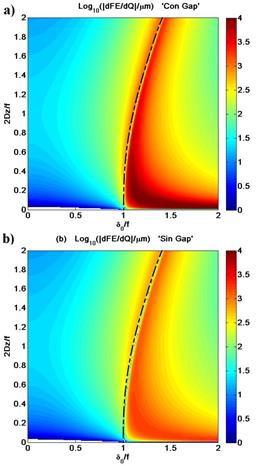
FIG. 7: Mapas en función del espacio de coordenadas (2Dz/f, δ0/f), definidas en la Fig. 3, del valor absoluto de la derivada (sensibilidad del sistema) de la Ec. (25) en escala logarítmica, para el caso (a) considerando los gaps del detector (b) sin considerarlos. Las zonas blancas en la esquina inferior izquierda de cada mapa, corresponden a valores fuera de la escala graficada donde la derivada tiende a cero. La línea sobre el mapa delimita el cambio de signo de la derivada.
Por otra parte, en ambos casos la derivada presenta un cambio de signo a partir de la región delimitada con una línea de trazos en el mapa. Esto puede observarse en la Fig. 8 donde se muestran los radios del haz W x , W y en la posición del detector y la señal FE como función del parámetro Q para dos pares (2D Z /f, δ 0/f) diferentes, uno en la región de derivada positiva y otro en la región de derivada negativa. Nótese que este cambio de signo corresponde a la inversión de las posiciones de las cinturas del haz en una y otra dirección respecto al punto Q = 0.

FIG. 8: Radios del haz de prueba Wx, Wy en la posición del detector y señal FE como función del parámetro Q para (a) (2Dz/f = 1.8, δ0/f=1.3), (b) (2Dz/f = 0.2, δ0/f=1.3).
Cabe destacar que la elección final de las posiciones dependerá del sistema particular a desarrollar debido a que la interposición de otros elementos ópticos e incluso las piezas propias de montaje de los componentes de este sistema, limitarán las distancias mínimas de D z y δ 0 que se puedan alcanzar.
III. CONCLUSIONES
Dado el amplio espectro de aplicaciones de los sistemas de medición de error de foco, la optimización de su sensibilidad es altamente relevante. Esta optimización, requiere de información que depende fuertemente de la aplicación particular y de las componentes elegidas para su construcción. Sin embargo, se ha mostrado que, para las configuraciones desacopladas propuestas, es posible tratar a los sistemas de medición por reflexión o por transmisión de manera análoga a partir de un simple cambio de variables y se ha desarrollado un método de cómputo de la sensibilidad de dichos sistemas a partir de una simulación numérica.
Dentro de las componentes a elegir, se halla el detector a utilizar. En el caso de usarse un detector de cuatro cuadrantes, además de la forma y tamaño del mismos, es necesario considerar los gaps donde no se detecta la luz incidente. Por un lado, si el haz se enfoca a un tamaño mucho menor al tamaño del gap central se produce una pérdida de la señal suma lo cual obligará a aumentar la potencia del haz. Este aumento, quedará limitado por la tolerancia del detector utilizado.
Por otra parte, a partir de la simulación numérica detallada, se observó un aumento de la sensibilidad del sistema en zonas donde el radio del haz es igual o menor al tamaño del gap central, el cual actúa como un pinhole volviendo al detector más sensible ante variaciones de la forma del haz en comparación con un caso sin gap. En particular, esta sensibilidad aumenta aún más cuando se atraviesa la región de cambio de signo de la derivada de la Ec. (25), en la cual las cinturas del haz en cada dirección invierten el orden en el cual se ubican respecto del detector.
Este resultado permite notar la existencia de una relación de compromiso entre la pérdida de la señal suma por sobre-enfocado y el aumento en la sensibilidad del sistema. En general y a modo de conclusión final, bastará con concentrar los esfuerzos en el diseño del sistema, de modo que el radio del haz sobre el detector sea del orden del tamaño del gap central. Luego a partir de un análisis del sistema, empleando de la simulación propuesta, corregir las posiciones de los componentes ópticos de modo de aumentar la sensibilidad al límite máximo establecido por las dimensiones reales que pueden definirse.

