










Servicios Personalizados
Revista

Articulo
 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkMeteorologica
versión On-line ISSN 1850-468X
Meteorologica vol.44 no.2 Ciudad Autónoma de Buenos Aires dic. 2019
ARTÍCULOS ORIGINALES
Evaluación preliminar de un sistema de pronóstico de precipitación a muy corto plazo basado en la extrapolación de datos sintéticos de radar
Aldana Arruti1,3, Juan Ruiz1,2,3, Paola Salio1,2,3 y Yanina García Skabar1,3,4
1 CONICET
2 Centro de Investigaciones del Mar y la Atmósfera, CONICET, UBA
3 UMI-Instituto Franco Argentino sobre Estudios del Clima y sus Impactos CNRS 3351
4 Servicio Meteorológico Nacional, Buenos Aires, Argentina
Dirección Electrónica: aarruti@smn.gov.ar
Manuscrito recibido el 7 de noviembre de 2017,
en su versión final el 28 de junio de 2018
RESUMEN
El centro y norte de Argentina es una de las regiones más favorables a nivel mundial para la ocurrencia de eventos meteorológicos de alto impacto. Dichos eventos pueden generar precipitaciones intensas, granizo de gran tamaño y/o vientos extremos, causando enormes perjuicios para la población. Por ello, es fundamental avanzar en la mejora del pronóstico a muy corto plazo (0-6 horas) de este tipo de eventos.
En el presente trabajo se desarrolla y evalúa un modelo de pronóstico basado en técnicas de extrapolación del campo de reflectividad medida por los radares meteorológicos, partiendo de la hipótesis de que la evolución de los sistemas precipitantes puede ser pronosticada en el muy corto plazo asumiendo persistencia lagrangiana. El método consiste en un primer paso, en la estimación del campo vectorial que describe el desplazamiento de la reflectividad. Posteriormente ese campo de movimiento es utilizado para extrapolar el desplazamiento del campo de reflectividad utilizando un método advectivo semi-lagrangiano. En este trabajo se comparan diferentes variantes del algoritmo que estima el desplazamiento del campo de reflectividad y su impacto en el pronóstico de la evolución del campo de reflectividad a 2 horas de plazo.
Los experimentos son llevados a cabo para un caso que representa la evolución de un sistema convectivo sobre la zona central de Argentina. Se utilizan datos sintéticos de radar generados a partir de una simulación numérica con alta resolución que resuelve explícitamente la dinámica de la convección.
Palabras clave: Pronóstico a muy corto plazo; Radar; Reflectividad.
ABSTRACT
Preliminary evaluation of a very short term precipitation forecast system based on the extrapolation of radar synthetic data
Central and northern Argentina are one of the most favorable regions for the occurrence of high impact meteorological events. These events can generate intense precipitation, large hail and/or extreme winds, causing enormous damages to the population. Therefore, it is essential to make progress in improving very short-term weather forecasts (0-6 hours) of this type of events.
In this work, a very-short term forecast model based on extrapolation techniques of the reflectivity field is developed and evaluated. This method assumes that precipitating systems can be described from their movement, estimated from the latest available information and consists in two steps. Firstly, it estimates a vector field describing the displacement of the reflectivity field. Secondly, this motion field is used to extrapolate the reflectivity field displacement using a semi-lagrangian advective method. In this work we compare different variants in the algorithm that estimates the displacement of the reflectivity field and its impact on 2-hr reflectivity field forecasts.
Experiments were performed for a case that represents the evolution of a convective system over central Argentina. We use synthetic radar data generated from a numerical simulation with high resolution that explicitly resolved convection dynamics.
Keywords: Nowcasting; Radar; Reflectivity.
1. INTRODUCCIÓN
Los pronósticos de precipitación se han convertido en una herramienta esencial para diferentes aplicaciones. No obstante, es uno de los que presenta un grado mayor de incertidumbre debido a la complejidad de los mecanismos físicos involucrados en la generación de la precipitación y en la naturaleza multiescala de dichos mecanismos. De acuerdo con Reyniers (2008), los modelos numéricos globales no pueden pronosticar adecuadamente la precipitación durante las primeras horas de pronóstico, debido a que los sistemas de asimilación de datos en estas escalas no están preparados para inicializar adecuadamente la estructura de los sistemas precipitantes. Si bien existen sistemas de asimilación en alta resolución capaces de mejorar significativamente el desempeño de los pronósticos numéricos en las primeras horas, los mismos solo se encuentran disponibles en algunas regiones y son sumamente costosos computacionalmente. Por tal motivo, es necesario contar con metodologías que permitan obtener un pronóstico de precipitación confiable a corto plazo (0-6 horas) y que se encuentre disponible en tiempos operacionales. La extrapolación temporal de los datos medidos por sensores remotos (radar, satélite y detectores de descargas eléctricas) ha sido una de las técnicas más utilizadas para este fin (Wilson et al., 1998). Dichas técnicas se basan en la utilización de información de sensores remotos para realizar una descripción de la ubicación y desplazamiento de los sistemas precipitantes. Dicho desplazamiento es luego utilizado para realizar un pronóstico por extrapolación. Las técnicas pueden dividirse en dos grandes grupos: las técnicas basadas en la identificación y seguimiento de objetos individuales (seguimiento de celdas) y las técnicas basadas en la estimación de un campo de vectores de movimiento (VM).
Las técnicas basadas en la identificación y seguimiento de objetos utilizan criterios para segmentar un campo escalar como puede ser el de reflectividad o tasa de precipitación en una cantidad limitada de objetos a los cuales se puede asignar una serie de propiedades (tamaño, forma, intensidad, velocidad). Por otro lado, dichas técnicas realizan un seguimiento en el tiempo de los objetos, asociando los objetos identificados en imágenes sucesivas. El pronóstico a corto plazo puede llevarse a cabo en este caso extrapolando el movimiento de los objetos en base al desplazamiento observado en el pasado. Existen diversas técnicas basadas en estos principios que difieren en la manera en la que se definen los objetos, la forma en la que se identifica la continuidad de los objetos en imágenes sucesivas y la manera en la que se tratan las fusiones y separaciones de objetos. Entre las técnicas más utilizadas podemos citar TITAN (Thunderstorm Identification, Tracking, Analysis and Nowcasting; Dixon and Wiener, 1993), SCIT (Storm Cell Identification and Tracking; Johnson et al., 1998), TRACE3D (Handwerker, 2002). Una de las principales limitaciones de estas técnicas es que en muchos casos es difícil definir objetos individuales (por ejemplo en presencia de sistemas convectivos de gran tamaño o la presencia de áreas de precipitación estratiforme) que puedan ser caracterizados adecuadamente por un único VM.
Las técnicas basadas en la obtención de un campo de VM buscan definir un campo de movimiento que pueda caracterizar el desplazamiento y la deformación de las áreas precipitantes, a partir de una secuencia de imágenes. Dicho campo de movimiento, se usa luego para advectar en el tiempo un campo escalar que puede ser la reflectividad, la tasa de precipitación u otra cantidad. Existen numerosas técnicas basadas en este principio: Rinehart and Garvey (1978) propusieron la técnica de Tracking Radar Echoes by Correlation (TREC) para determinar el campo de movimiento que mejor explica la transición entre 2 o más imágenes sucesivas utilizando el concepto de seguimiento de áreas. Una de las limitaciones de la técnica TREC, es que las velocidades estimadas muchas veces presentan poca coherencia espacial, produciendo entre otras cosas fuertes convergencias y divergencias en el campo de movimiento. Para solucionar este problema, Li et al. (1995) introdujeron la técnica CO-TREC, en donde se impone al campo de movimiento horizontal estimado la condición de no divergencia. Por otra parte, Laroche et al. (1994) propusieron una forma alternativa para la obtención del campo de VM, basado en un algoritmo variacional que busca el campo de movimiento que minimiza la distancia entre la advección de una imagen y la imagen obtenida en un tiempo posterior. Incorporando además un término adicional en la función de costo que impone una condición de suavidad espacial sobre el campo de movimiento obtenido. Este algoritmo fue implementado en el MAPLE (McGill Algorithm for Precipitation Nowcasting by Lagrangian Extrapolation; Germann and Zawadzki, 2002). Dado que las escalas espaciales más pequeñas tienen asociados tiempos de vida menores y por ende son menos predecibles, Seed (2003) propuso el modelo S-PROG (Spectral Prognosis), el cual tiene la habilidad de filtrar las escalas menos predictibles a medida que el tiempo de pronóstico aumenta. Este tipo de consideraciones también fue incorporada en el algoritmo MAPLE (Turner et al., 2004).
En la actualidad existen numerosos sistemas de pronóstico a muy corto plazo funcionando de forma operativa. El Observatorio de Hong Kong emplea el sistema SWIRLS (Short-range Warnings of Intense Rainstorms in Localized Systems; Li and Lai, 2004; Woo and Wong, 2017) que combina las técnicas TREC y GTrack (Group Tracking of Radar echoes). Europa central cuenta con INCA-CE (Integrated Nowcasting Comprehensive Analysis - Central Europe; (Wang et al., 2017) desarrollado originalmente en Austria y usado por 24 servicios meteorológicos de Austria, República Checa, Alemania, Hungría, Italia, Polonia, Eslovaquia y Eslovenia. El sistema del National Center for Atmospheric Research (Mueller et al., 2003) es uno de los más complejos, ingesta datos de reflectividad, velocidad doppler, satélite, sondeos, entre otros. El algoritmo MAPLE brinda un pronóstico de tres tipos de precipitación a 3 horas a partir de un mosaico de imágenes de radar sobre el sudeste de Quebec y el noreste de Estados Unidos (Radhakrishna et al., 2012). La oficina meteorológica del Reino Unido utiliza el sistema NIMROD que integra técnicas de pronóstico a muy corto plazo con productos de un modelo numérico y el sistema STEPS que genera un pronóstico probabilístico de precipitación basado en ensambles (Golding et al., 1998; Bowler et al., 2006).
Actualmente, el Servicio Meteorológico Nacional (SMN) emite avisos a muy corto plazo (ACP; Lohigorry et. al., 2018) cuando en un área determinada se observan condiciones favorables para la ocurrencia de tormentas fuertes o severas basados en el análisis de imágenes satelitales y de radar. Por tal motivo, la emisión de estos avisos, se produce únicamente en el área de cobertura de la red de radares con la que cuenta actualmente el país, los cuales se encuentran ubicados en Ezeiza, Córdoba, Pergamino, Paraná y Anguil. La cobertura de radares continúa en expansión a través del Sistema Nacional de Radares Meteorológicos. Actualmente, el desplazamiento de los sistemas precipitantes que se utiliza para la elaboración de los ACP, así como la evaluación de su intensidad y potencial de severidad se obtiene de forma subjetiva. Los ACP tienen una validez de 3 horas desde su emisión. Finalizadas las tres horas el pronosticador actualiza el polígono del área afectada y los posibles fenómenos.
La implementación de las técnicas de extrapolación de datos de radar que brindan información detallada sobre la posible estructura y evolución de las tormentas convectivas podría conllevar a una mejora de los ACP proveyendo una forma objetiva de estimar la evolución futura de los sistemas precipitantes. Por otra parte, las técnicas de pronóstico a muy corto plazo pueden ser extendidas a la extrapolación de regiones favorables para la ocurrencia de granizo, o asociadas a actividad eléctrica intensa como se ha implementado en el sistema SWIRLS, lo cual contribuiría a mejorar también el pronóstico a muy corto plazo de este tipo de fenómenos. En Argentina son pocos los trabajos que han abordado el estudio del desempeño de técnicas de pronóstico a muy corto plazo basado en extrapolación de datos de radar (Gimenez and Macor, 2015). En particular interesa saber cómo se comportan este tipo de técnicas en presencia de sistemas precipitantes como los que frecuentemente ocurren en la zona centro y norte de Argentina. En esta zona, la convección frecuentemente ocurre organizada en forma de sistemas convectivos de mesoescala que presentan extensiones espaciales extremas a nivel global (Zipser et al., 2006). Este tipo de sistemas explica aproximadamente el 80% de la precipitación que se registra durante la estación cálida (Zipser et al., 2006; Vidal 2014). Es por tal motivo que resulta de particular interés avanzar en el estudio del desempeño de las técnicas de extrapolación para el pronóstico de la evolución del campo de precipitación asociado a dichos sistemas. El objetivo de este trabajo está centrado en un análisis de sensibilidad de un algoritmo de pronóstico a corto plazo basado en la extrapolación de ecos de radar. En particular se explora la sensibilidad de dicho algoritmo a diferentes parámetros involucrados en el cálculo de los VM. La técnica está basada en un algoritmo de tracking similar a TREC para determinar los VM y en la utilización de un esquema advectivo semi-lagrangiano para advectar el campo de reflectividad. El estudio de la sensibilidad se realiza a través de un experimento idealizado, en donde las observaciones de radar son simuladas en forma sintética a partir de una simulación de alta resolución realizada con un modelo numérico. Dicha simulación corresponde a la ocurrencia de un sistema convectivo de mesoescala sobre la zona central de Argentina.
Este trabajo está organizado de la siguiente forma: en la sección 2 se presentan los datos utilizados, la metodología empleada para el cómputo de los VM, la advección para la obtención de un pronóstico y el seteo experimental para los diferentes parámetros utilizados. En la sección 3 se discuten los resultados obtenidos. Finalmente en la sección 4 se presentan las conclusiones.
2. DATOS Y METODOLOGÍA
2.1 DATOS DE REFLECTIVIDAD
Los campos de reflectividad que se utilizan en el presente trabajo se simulan utilizando el modelo numérico Weather Research and Forecasting con núcleo dinámico ARW (WRF-ARW V3.6.1). Se emplean 3 retículas anidadas de 10km, 2km y 500m de resolución espacial y paso temporal de 40, 6 y 2 segundos respectivamente. Las retículas 1 y 2 fueron inicializadas a las 12 UTC del 22 de enero de 2014 (4 horas antes del inicio de los experimentos de pronóstico a muy corto plazo) y la retícula 3 se inicializa a las 15UTC usando como condición inicial el estado de la retícula 2 en dicho momento.
La reflectividad se calcula a partir del contenido de agua de lluvia, graupel y nieve en la simulación realizada con el modelo WRF. Dichos valores de reflectividad son interpolados a una altura de 2 km por encima de la superficie que se encuentra dentro del rango de valores típicamente utilizados para este tipo de aplicaciones (Sokol et. al., 2017; Woo and Wong 2017) y a una retícula con una resolución horizontal de 2 km cubriendo un dominio con una dimensión horizontal de 500 km x 500 km. La frecuencia temporal de los datos sintéticos es de 5 minutos y el período simulado se extiende entre las 15 y las 22 UTC del 22 de enero de 2014. Durante este período se produjo la iniciación y desarrollo de un sistema convectivo de mesoescala que produjo precipitaciones intensas sobre el centro de Argentina (Figura 1). La resolución utilizada en el modelo permite la representación explícita de la convección húmeda profunda que ocurre en la parte delantera de dicho sistema dando lugar a un comportamiento realista en términos de las tasas de crecimiento y desplazamiento del sistema durante la etapa de formación y madurez.
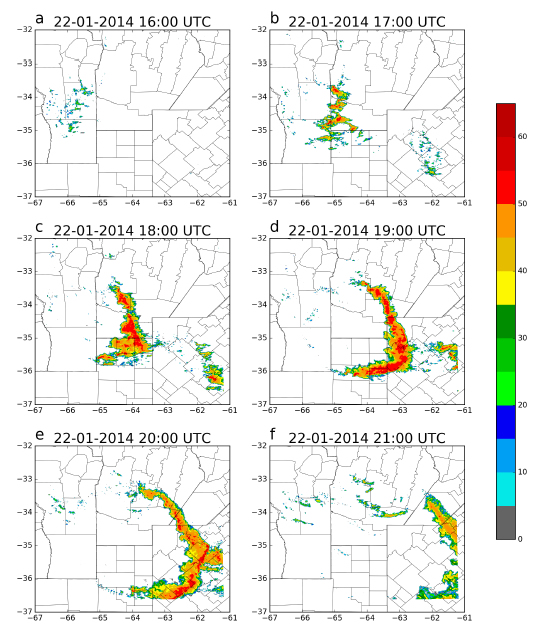
Figura 1: Secuencia de datos sintéticos de reflectividad a 2 km correspondiente al día 22 de enero de 2014 para las horas de 16 UTC (a), 17 UTC (b), 18 UTC (c), 19 UTC (d), 20 UTC (e), 21 UTC (f).
Dado que la condición inicial utilizada no contiene información sobre las nubes, la convección húmeda profunda se inicia durante las primeras horas de la simulación. Este período es considerado como el proceso de spin-up del modelo, no obstante en este trabajo se lo asocia con la etapa de iniciación de la convección (Sobash et al., 2013; Otsuka et al., 2015). La utilización de una simulación numérica para generar los campos de reflectividad permite evaluar la potencialidad de la técnica de extrapolación en un contexto controlado, sin la complejidad asociada a los errores presentes en los datos de radar. A la vez el modelo numérico es capaz de reproducir en forma realista los procesos que llevan al crecimiento y propagación de los sistemas precipitantes como el que se discute en el presente trabajo. No obstante la utilización de datos sintéticos puede sobreestimar la calidad del desempeño de los algoritmos de pronóstico a muy corto plazo (Otsuka et al., 2015). Esto se debe fundamentalmente al filtrado de las escalas que el modelo no puede simular explícitamente y que son las que pierden predictibilidad más rápidamente (Seed, 2003), la ausencia de atenuación, ecos no meteorológicos y otros efectos que normalmente afectan negativamente el desempeño de los pronósticos por extrapolación debido a que dificultan la estimación del campo de vectores de movimiento (Zawadzki, 1984).
2.2 METODOLOGÍA
El método de extrapolación implementado utiliza una técnica basada en la advección de un campo de reflectividad. Esta técnica parte de la metodología TREC (Rinehart and Garvey, 1978), pero incluye también la posibilidad de utilizar error cuadrático medio como medida de similitud (e.g. Sokol et al., 2017) y se complementa con una etapa de post-procesamiento de los VM que busca reducir las limitaciones de la técnica TREC mediante el control de calidad y el suavizado de los VM obtenidos. Por ese motivo denominamos a esta implementación Smooth Tracking Reflectivity Echos by Similarity (S-TRES). A partir del campo estimado de VM, se realiza la advección del campo de reflectividad utilizando un esquema advectivo semi-lagrangiano. Este método consta de 3 etapas: a. Estimación preliminar de un campo de VM basados en métricas de similitud; b. Control de calidad y suavizado del campo obtenido; c. Extrapolación del campo de reflectividad utilizando el esquema advectivo semi-lagrangiano. La implementación del algoritmo se llevó a cabo utilizando un código de desarrollo propio que combina Python 2.7 y Fortran y que se encuentra paralelizado para sistemas de memoria compartida utilizando OpenMP. El código se encuentra disponible en: https://github.com/arrutia/MV.git.
2.2.1. ESTIMACIÓN DE LOS VECTORES DE MOVIMIENTO
En el presente estudio, la determinación de los VM se realiza en dos pasos, el primer paso consiste en una estimación preliminar de los VM a partir de una técnica que mide la similitud entre 2 campos de reflectividad en tiempos sucesivos basada en la propuesta por Rinehart and Garvey (1978) y Sokol et al. (2017). Se calcula el VM para cada punto de retícula, para lo que se define un área cuadrada alrededor de cada uno de los puntos. A fin de definir los bloques correspondientes a los puntos de retícula del borde o cercanos a éste, se extiende el dominio original en forma artificial en todas las direcciones asignando un valor de 0 a los puntos de retícula que resultan de dicha extensión.
Cada bloque del campo de reflectividad correspondiente a un tiempo determinado (t0 −t) se compara con los bloques correspondientes a una imagen posterior (t0) que se encuentran a una distancia menor a un umbral fijo (Figura 2). Este umbral establece una cota superior a la intensidad de los VM que se fija en función de las velocidades máximas que se estima pueden alcanzar los sistemas precipitantes en una determinada región. Con el fin de incrementar la precisión de los VM estimados y para reducir el costo computacional de la técnica, los VM solo se calculan a partir de bloques en donde más de un 4% de los píxeles tienen valores de reflectividad por encima de 0 dBZ.
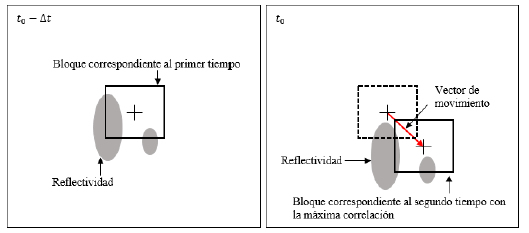
Figura 2: Esquema de la técnica TREC para la obtención del VM de reflectividad (sombreado) entre los tiempos t0 − t y t0.
Otro aspecto importante de la técnica que puede tener un impacto sobre el cálculo de los VM es la medida de similitud que se emplea para comparar los bloques correspondientes a diferentes tiempos. En este trabajo, se utilizan dos medidas de similitud para la comparación entre los bloques de reflectividad de los campos sucesivos. La primera métrica es el coeficiente de correlación lineal, en cuyo caso para cada punto de retícula, podemos definir una matriz de similitud (MS) cuyos elementos contienen la correlación entre los bloques de reflectividad en el tiempo t0 −t y los bloques de reflectividad en el tiempo t0 desplazados i y j puntos de retícula en la dirección de i y j respectivamente:

Donde, x e y son las coordenadas del centro del bloque, i y j representan los desplazamientos cuyo módulo está acotado por imáx y jmáx respectivamente. R(x,y,t0−t) es un vector que contiene el valor de la reflectividad en todos los puntos de retícula contenidos en el bloque centrado en x e y al tiempo t0−t, R(x,y,t0−t) es el valor medio de los elementos de dicho vector. R(x−i,y−j,t0) es un vector conformado por el valor de reflectividad en los puntos de retícula del bloque centrado en x − i e y − j en t0 y R(x−i,y−j,t0) el valor medio de dicho vector. La otra métrica de similitud utilizada se basa en el error cuadrático medio (ECM). En este caso, los elementos de la MS se definen de acuerdo a la siguiente expresión:

Donde N es la cantidad total de puntos de retícula en el bloque.
Para estimar el VM, primero se identifica el desplazamiento óptimo (xopt, yopt) que se define como aquel que produce el máximo de similitud entre los dos campos de reflectividad. En este trabajo y siguiendo a Otsuka et al., (2015), el desplazamiento que se utiliza para estimar el VM, es un promedio pesado de los desplazamientos que corresponden a las posiciones que rodean al desplazamiento asociado al máximo de la MS y el peso utilizado es el valor de la similitud. Este desplazamiento pesado puede tomar esencialmente cualquier valor, mientras que el desplazamiento calculado a partir de la posición del máximo de la norma sólo puede tomar valores enteros.
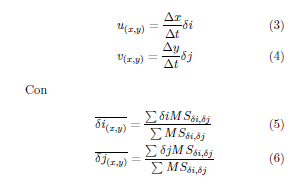
Donde i y j son los desplazamientos alrededor del desplazamiento que corresponde al máximo de la norma.
Una de las debilidades de la técnica TREC es que la estimación de los VM suele presentar resultados ruidosos cuando se intentan analizar los detalles de menor escala asociados al desplazamiento y deformación de los sistemas de precipitación (Li et al., 1995). Existen en la literatura diversas alternativas para reducir esta limitación de la técnica. Por ejemplo, la técnica COTREC (COntinuity TREC; Li et al., 1995) impone la condición de no divergencia para el campo movimiento en una etapa de post-procesamiento con el fin de reducir los errores en la estimación de los VM, la técnica SWIRLS (Li y Lai., 2004), en cambio, emplea un umbral para el ángulo de desviación entre los VM obtenidos utilizando TREC y luego aplica un filtro de Cressman al campo de movimiento. Por otra parte, Sokol et. al. (2017) emplean el error cuadrático medio como medida de similitud entre las imágenes consecutivas de reflectividad y luego aplica un filtro gaussiano a las componentes del campo de movimiento. En el presente trabajo se emplean dos pasos adicionales orientados a incrementar la suavidad del campo de movimiento. En primer lugar se aplica un control de calidad que permite detectar desplazamientos estimados que se encuentran muy afectados por el ruido, y en segundo lugar se aplica un suavizado espacial del campo de VM mediante un filtro Gaussiano que permite filtrar parte del ruido remanente. El control de calidad desarrollado en este trabajo se basa en el cálculo de anomalías locales en el campo de VM. A tal efecto, se calcula la diferencia entre la magnitud del VM obtenido en cada punto de retícula y la media local de la magnitud en un área de 61 x 61 puntos de retícula centrado alrededor de dicho punto de retícula. Si el módulo de la diferencia excede los 7 m/s, el VM en dicho punto es considerado dudoso y reemplazado por un código de dato faltante.
Una vez realizado el control de calidad, se procede a completar el campo de VM. Dado que la técnica utilizada solo produce estimaciones de VM en los puntos de retícula cercanos a los sistemas precipitantes, es necesario proveer un valor en todos los demás puntos de forma tal de producir una estimación completa de los VM sobre todo el dominio, la cual es requerida para llevar adelante la extrapolación. Para ello se toma el VM medio sobre todo el dominio, y se asigna dicho VM a todos los puntos de retícula donde la técnica no permite estimar los VM dada la ausencia de valores reflectividad de sistemas precipitantes. Una vez completo el campo de VM sobre todo el dominio, se aplica un filtro gaussiano en dos dimensiones. El mismo tiene dos finalidades: por un lado reducir el efecto de las discontinuidades introducidas al momento de completar el campo de VM y por otro lado reducir el ruido en la estimación de los VM. El filtro gaussiano se implementa con una escala horizontal de 40 km.
2.2.2. EXTRAPOLACIÓN DE LA EVOLUCIÓN DE LOS SISTEMAS PRECIPITANTES
La advección del campo de reflectividad a partir de los VM obtenidos con S-TRES, se realiza utilizando un esquema advectivo semi-Lagrangiano (Robert, 1981) hacia atrás. El problema a resolver presenta la siguiente forma:
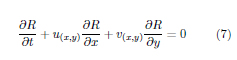
Donde R representa el campo de reflectividad y u y v representan las componentes zonal y meridional de los VM respectivamente. La Ecuación 7, asume persistencia en el sentido lagrangiano, es decir que la variable R es transportada por el campo de VM, pero no existen fuentes o sumideros de R que puedan modificar la intensidad de los sistemas precipitantes en el tiempo. Por otra parte, los VM se asumen constantes durante el pronóstico lo que puede llevar a errores dado que el campo de movimiento real puede variar ante cambios en la situación sinóptica, como por ejemplo ante el pasaje de un sistema frontal. Esta invariabilidad supuesta en el campo de movimiento genera errores que producen una menor performance de los pronósticos obtenidos (Woo and Wong, 2017). En diferentes trabajos se intenta considerar la variabilidad en la intensidad del sistema precipitante, por ejemplo, Torres et al. (2016) desarrollan una técnica de predicción inmediata implementando un modelo no lineal con componentes estocásticos y deterministas.
El esquema advectivo semi-lagrangiano hacia atrás implementado determina la posición de la cual proviene la parcela en cada paso temporal mediante las siguientes ecuaciones:
Donde xi e yi representan las coordenadas del punto de retícula inicial del cual proviene la parcela. xf e yf representan las coordenadas del punto de retícula al cual llega en un tiempo ti+_ luego de ser advectada por el campo de VM. Así, la solución para el problema de advección (Ecuación 7) está dada a través de la siguiente ecuación:
![]()
Donde R(xf ,yf ,ti+) es el valor del campo de reflectividad a pronosticar para el tiempo ti + y el punto de retícula xf y yf . R(xi,yi,ti) es el valor del campo de reflectividad en la posición de origen de la parcela. Este punto no coincide con un punto de retícula por lo que para poder determinar el valor del campo de reflectividad allí se realiza una interpolación a partir de splines cúbicos.
2.3 VALIDACIÓN DE LOS PRONÓSTICOS
A fin de evaluar la calidad de los pronósticos obtenidos se utilizan índices basados en la ocurrencia de valores de reflectividad por encima de un determinado umbral y una tabla de contingencia, en donde se indican las frecuencias de los siguientes eventos: aciertos, corresponden a los casos en donde la reflectividad observada y la pronosticada están por encima del umbral seleccionado, sorpresas corresponden a los casos en donde la reflectividad observada está por encima del umbral, pero la pronosticada está por debajo; falsas alarmas corresponden a los casos en los que la reflectividad pronosticada se encuentra por encima del umbral pero la observada se encuentra por debajo; y correctos negativos que corresponden a los casos en los que tanto la reflectividad observada como pronosticada están por debajo del umbral. A partir de dicha tabla, se calcula el índice categórico Equitable Threat Score (ETS), que tiene en cuenta la habilidad del pronóstico para representar la magnitud y ubicación de los sistemas precipitantes y se define como:

Donde A es la frecuencia de aciertos, S es la frecuencia de sorpresas, FA es la frecuencia de falsas alarmas, Aazar es la frecuencia de aciertos que ocurren por azar y N es la cantidad total de pares pronóstico-observación considerados en el cálculo. El rango de valores que puede tomar este índice se extiende entre −13 y 1, siendo el valor de 1 el que corresponde a un pronóstico perfecto y un valor de 0 el que corresponde a un pronóstico que tiene el mismo nivel de acierto que un pronóstico al azar.
2.4 DEFINICIONES EXPERIMENTALES
La técnica de extrapolación propuesta se basa en la hipótesis de persistencia Lagrangiana del campo de reflectividad. Debido a esto, se espera que el desempeño de la misma sea mejor durante la etapa madura del sistema convectivo, en donde dicha hipótesis está más cerca de cumplirse. Por otra parte, es esperable que la técnica presente un peor desempeño durante la etapa de desarrollo del sistema convectivo, cuando se incrementa el área abarcada por el sistema y la intensidad de la reflectividad asociada al mismo. Por este motivo la verificación de los pronósticos se lleva adelante agrupando los mismos en dos períodos, uno correspondiente a la etapa de desarrollo, y otro correspondiente a la madurez del sistema convectivo.
La Figura 3 muestra la evolución temporal del porcentaje del dominio con reflectividad observada mayor a 20 dBZ y la tasa de crecimiento del área calculada a intervalos de 5 minutos. A partir de la evolución observada, se define a la etapa de desarrollo como el período caracterizado por una fuerte tasa de crecimiento e intensificación de la reflectividad que comprende el período entre las 16:00 y 17:30 UTC. La etapa de madurez, se define como aquella en donde las tasas de crecimiento son menores a las observadas durante la iniciación. Esta etapa se extiende aproximadamente entre las 18:00 y 19:30 UTC. En total se realizan 4 pronósticos en cada una de las etapas, inicializados con una frecuencia de 30 minutos y extendiéndose por 120 minutos. Por lo cual durante el desarrollo se dispone de los pronósticos inicializados a las 17:00, 17:10, 17:20 y 17:30; y para la madurez aquellos inicializados a las 18:00, 18:10, 18:20 y 18:30.
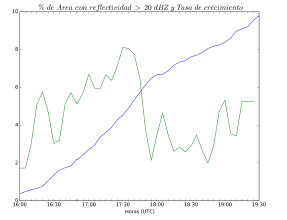
Figura 3: Porcentaje del área total del dominio con reflectividad mayor a 20 dBz (línea azul) y tasa de crecimiento (% de área con reflectividad mayor a 20 dBZ por minuto) multiplicada por un factor de 100 (línea verde).
• Comparación entre S-TRES y TREC: En primer lugar se busca cuantificar el beneficio de usar la técnica S-TRES, en la que se realiza un control de calidad y se aplica un filtro Gaussiano que permite reducir el ruido asociado a la estimación de los VM. Para esto se utiliza un tamaño de bloque de 80x80 puntos de retícula y un intervalo temporal de 10 minutos entre las imágenes de reflectividad.
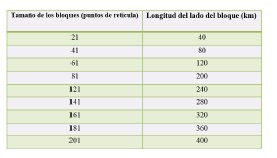
• Sensibilidad al tamaño de bloques: Con el fin de evaluar la sensibilidad del pronóstico de reflectividad a los distintos parámetros empleados para el cálculo de los VM se estudia el impacto a la variación del tamaño de los bloques que se utilizan en el cálculo de los VM. Este parámetro puede tener un impacto importante en el cálculo de los VM y por ende en el pronóstico por lo que se busca seleccionar un valor óptimo para el tamaño de los bloques para nuestra configuración experimental. Se evalúa la sensibilidad del método a dicho parámetro tomando 10 tamaños de bloques cuadrados que van desde áreas de 40km de lado (21 puntos de retícula) hasta 400 km (201 puntos de retícula). Notar que en este caso, los bloques más pequeños permitirían calcular algunos aspectos de la circulación de mesoescala, mientras que los bloques más grandes abarcan prácticamente todo el dominio y pueden capturar únicamente el desplazamiento medio de los sistemas precipitantes dentro del mismo. La Tabla 1 muestra todos los tamaños de bloque considerados. Para evaluar la sensibilidad a este parámetro se decide utilizar como medida de similitud el ECM y fijar un intervalo temporal de 10 minutos entre las imágenes de reflectividad.
• Sensibilidad a la medida de similitud: Un factor que influye en el resultado del campo de movimiento es la métrica utilizada en el cálculo de los VM. En este trabajo se utilizan el coeficiente de correlación (CC) y el error cuadrático medio (ECM). A su vez se fija un bloque de 80x80 puntos de retícula y un intervalo temporal de 10 minutos entre las imágenes de reflectividad.
• Sensibilidad al intervalo temporal: Otro factor que influye en el resultado del campo de VM es el intervalo temporal entre las imágenes de reflectividad empleado para su cálculo. Este factor determina la resolución con la que se puede calcular el desplazamiento de los sistemas precipitantes que es igual a x/t. Tomar intervalos de 5, 10, 15, 20 y 30 minutos permite estimar los VM con resoluciones de de 6.6, 3.3, 2.2, 1.6 y 1.1 m/s respectivamente. Para evaluar la sensibilidad del pronóstico a este parámetro se decide tomar un bloque de 80x80 puntos de retícula y utilizar el ECM como medida de similitud entre las imágenes de reflectividad.
Tabla I: Tamaño de los bloques considerados para el cálculo del campo de VM.
3. RESULTADOS
La Figura 4 muestra el campo de VM obtenidos a partir de la técnica TREC y S-TRES. El post-procesamiento implementado en S-TRES permite obtener un campo de movimiento con mejor coherencia espacial y menor ruido de la estimación. La Figura 5 exhibe la evolución del índice ETS para los pronósticos obtenidos a partir de la advección de un campo VM calculado con TREC y con S-TRES. Se puede notar una mejor performance de los pronósticos obtenidos a partir de S-TRES, sobre todo para los umbrales de reflectividad más bajos y para los plazos de pronóstico más largos.

Figura 4: VM obtenidos a partir de la técnica TREC (a), luego de aplicar el control de calidad (b) y luego de completar el campo de movimiento y aplicar el suavizado (c).

Figura 5: ETS en función del plazo de pronóstico para las técnicas TREC y S-TREC y para los umbrales de 15 dBZ (líneas llenas) y 50 dBZ (líneas punteadas) para las etapas de desarrollo (a) y madurez (b).
Como habitualmente sucede en el pronóstico de precipitación, el desempeño del pronóstico es peor para los umbrales de reflectividad altos respecto de los umbrales de reflectividad más bajos. Esto se debe a que existe una relación entre los umbrales de intensidad y la escala espacial, los umbrales más altos están generalmente asociados a patrones de menor escala (extremos en el campo de reflectividad) que tiene asociada menor predictibilidad (Germann and Zawadzki, 2002). Por otra parte y de acuerdo a lo esperado, el desempeño de la técnica es peor durante el período de desarrollo del sistema convectivo debido principalmente a las restricciones impuestas por la hipótesis de persistencia lagrangiana del campo de reflectividad.
La Figura 6 presenta los campos de reflectividad pronosticada a partir de los VM obtenidos con S-TRES inicializados en un horario correspondiente a la etapa de desarrollo y otros correspondientes a la etapa de madurez del sistema precipitante. Superpuesto a estos campos se encuentra la reflectividad sintética obtenida a partir del modelo WRF. Se puede observar que en este caso, los VM tienden a subestimar la velocidad del sistema convectivo. Esto puede tener dos posibles causas: por un lado una aceleración de la velocidad de desplazamiento del sistema convectivo a lo largo de su ciclo de vida. Este cambio en la velocidad de desplazamiento puede estar vinculado tanto a cambios en el entorno sinóptico como a cambios en la dinámica interna del sistema (por ejemplo aumento de la velocidad de desplazamiento del frente de ráfagas). Otro aspecto que puede contribuir a esta subestimación es el hecho de que la técnica empleada para estimar los VM, tiende en casos de sistemas precipitantes compuestos por varias celdas, a detectar el movimiento individual de las celdas que componen el sistema en lugar de detectar el movimiento del sistema precipitante en su conjunto (Woo and Wong, 2017). En este caso particular, el VM resultante subestima el movimiento del sistema, ya que el mismo se desplaza hacia el este a mayor velocidad debido a la continua generación de nuevas celdas sobre el frente de ráfagas. La Figura 7 muestra los diagramas de Hovmoller de la reflectividad observada y pronosticada realizando un promedio para todas las latitudes. El pronóstico utilizado corresponde al inicializado a las 18 UTC. En el diagrama se puede ver que el desplazamiento del sistema precipitante hacia el este se acelera hacia el final del pronóstico. Por otra parte la evolución del sistema pronosticado, muestra el comportamiento contrario ya que durante esta etapa, el desplazamiento hacia el este se desacelera. Esto último puede deberse al ingreso del sistema convectivo en una región en donde el campo de movimiento estimado está dominado principalmente por el desplazamiento medio, ya que inicialmente no había ecos en esta región del dominio que permitieran una mejor estimación de los VM. De acuerdo con lo que se puede ver en la Figura 4, la componente zonal de los VM estimados globalmente es menor a la que se estima en la región donde se encuentra el sistema convectivo en la latitud a la que se realizó el hovmoller de la Figura 7.
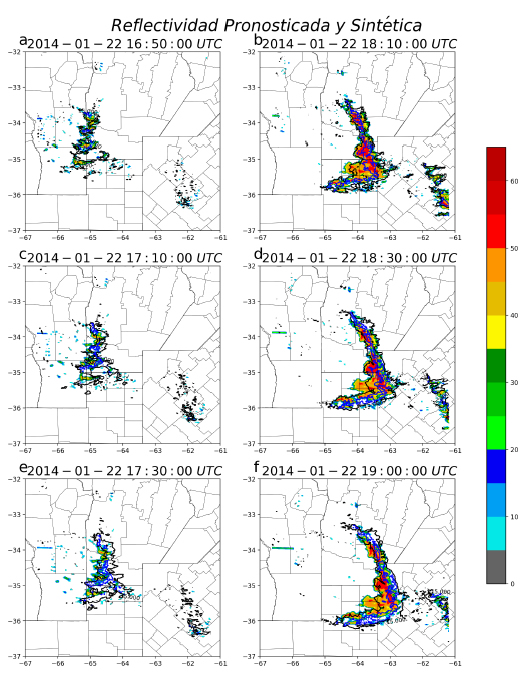
Figura 6: Campos de reflectividad pronosticada (sombreado) y reflectividad sintética (contornos). El contorno negro corresponde al umbral de reflectividad de 15 dBZ y el contorno azul a 50 dBZ. Los plazos de pronóstico ilustrados corresponden a 20 (a, b), 40 (c, d) y 60 (e, f) minutos respecto a un pronóstico inicializado a las 16:30 UTC (a, c, e) y otro inicializado a las 18:00 UTC (b, d, f).
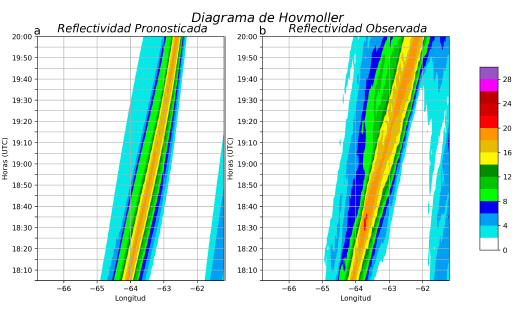
Figura 7: Diagrama de Hovmoller de reflectividad pronosticada (a) y observada (b) para el pronóstico inicializado a las 18 UTC.
A continuación se discuten los resultados del experimento de sensibilidad al tamaño de los bloques utilizados en el cálculo de los VM. La Figura 8 muestra las componentes zonal (u) y meridional (v) de los VM obtenidos a las 18:35 UTC, previo a la aplicación de un control de calidad, utilizando bloques de 40 km, 160 km y 320 km de lado. Se puede observar que para el área de menor tamaño, los VM presentan saltos importantes en magnitud y dirección con grandes gradientes de velocidad en áreas reducidas, mientras que a medida que aumenta el tamaño del bloque considerado, se tiene un campo de movimiento más suavizado.

Figura 8: Componentes zonal u (a, c, e) y meridional v (b, d, f) de los vectores de movimientos correspondientes a las 18:35 UTC, para 3 tamaños de bloques distintos, 21 (a, b), 81 (c, d) y 161 puntos de retícula (e, f).
La Figura 9 muestra la variación del índice ETS para cada tamaño de bloque utilizado para el cálculo de los VM para los umbrales de reflectividad de 15 y 50 dBz para las etapas de desarrollo y madurez. A las 16 UTC no se tienen VM para los bloques de 121, 141, 161, 181 y 201 puntos de retícula y a las 16:30 UTC no se tienen VM para el bloque de 201 puntos de retícula debido a que no se cuenta con un área de reflectividad extensa para el cálculo de los VM. Por ende, para dichos horarios de inicialización de pronósticos sólo se verifican los pronósticos utilizando los VM disponibles. Por esta razón, la comparación de los pronósticos obtenidos según el cambio en el parámetro del tamaño de cada bloque se realiza para todos los bloques en la etapa de madurez, y para los bloques correspondientes a 21x21, 41x41, 61x61, 81x81 y 101x101 puntos de retícula en la etapa de desarrollo. Hacia el inicio del pronóstico, se observan valores de ETS similares para todos los bloques debido principalmente a que todos los pronósticos parten de la misma condición inicial. En la etapa de madurez, para el umbral de reflectividad más bajo se puede notar que durante la primer hora de pronóstico el bloque de menor tamaño (21x21 puntos de retícula) se aparta respecto a los demás bloques evidenciando una menor calidad del pronóstico. Durante la primera hora de pronóstico y durante la etapa de madurez, los valores de ETS más grandes se obtienen con cajas de 61x61 km y 81x81 km, mientras que durante la segunda hora de pronóstico, los mejores resultados se obtienen con cajas más grandes, siendo la de 161x161 km la que presenta los valores más altos de ETS. Un comportamiento similar se observa durante la etapa de iniciación, aunque en este caso son las cajas de 101x101 km las que producen los mejores resultados para los plazos de pronóstico más largos y la sensibilidad observada al tamaño de las cajas es menor que durante el período de madurez. Los resultados obtenidos sugieren que a medida que aumenta el plazo de pronóstico, utilizar un campo de movimiento más suave (es decir calculado con subdominios más grandes) lleva a mejores resultados, mientras que en plazos de tiempo más cortos (menores a 60 minutos) retener escalas más pequeñas en el campo de movimiento produce mejores resultados. Este resultado es consistente con la idea de que las escalas más pequeñas son menos predecibles y por ende pueden producir un impacto positivo en los pronósticos a corto plazo, pero generan un impacto negativo en los pronósticos a más largo plazo. Los tamaños de bloques que dan mejores resultados en el caso analizado, son mayores en tamaño que los bloques utilizados en otros estudios (Liang et al., 2010; Kato et al., 2017; Woo and Wong, 2017). Esto puede deberse a que en el presente caso, al tratarse de un sistema convectivo de mesoescala, el movimiento del sistema precipitante está dominado por escalas de movimiento relativamente grandes que son adecuadamente capturadas por los bloques de mayor tamaño existiendo poco valor agregado en la incorporación de detalles de menor escala en el campo de VM. Por otra parte, el algoritmo de similitud sobre el cual se basa la estimación de los VM resulta más robusto cuando el tamaño de los bloques es mayor lo cual también puede contribuir a los resultados obtenidos.
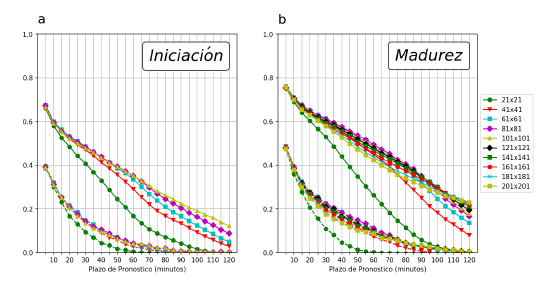
Figura 9: ETS en función del plazo de pronóstico para los diferentes tamaños de bloque y para los umbrales de 15 dBz (líneas llenas) y 50 dBz (líneas punteadas) en las etapas de iniciación (a) y madurez (b).
La Figura 10 muestra los resultados del experimento de sensibilidad a la métrica utilizada para el cálculo de los VM. El mejor desempeño correspondiente a la utilización del ECM sobre el CC se evidencia aproximadamente a partir de los 30 minutos de plazo de pronóstico en el ETS en la etapa de madurez. Sin embargo, para la etapa de desarrollo, la diferencia en la calidad de los pronósticos obtenidos a partir de las dos metodologías no es tan evidente. Por otra parte, el tiempo de cómputo de los VM es menor cuando se utiliza el ECM. Esto es debido a que el cálculo del CC requiere realizar una mayor cantidad de operaciones de punto flotante. A modo de ejemplo para el bloque de 81 puntos de retícula, el tiempo empleado para el cálculo de los VM a partir del ECM fue de 33.68 segundos, mientras que mediante el CC fue de 96.42 segundos. De esta manera, el buen desempeño del ECM sobre el CC se ve reflejado tanto en la calidad del pronóstico obtenido como en el tiempo de cálculo del mismo.

Figura 10: ETS en función del plazo de pronóstico utilizando el ECM (azul) y CC (rojo) como medida de similitud en el cálculo de los vectores de movimiento y para los umbrales de 15 dBz (líneas llenas) y 50 dBz (líneas punteadas), para las etapas de iniciación (a) y madurez (b).
La Figura 11 muestra los resultados del experimento de sensibilidad al intervalo temporal entre imágenes utilizadas en el cálculo de los VM. Como se indicó previamente, un mayor intervalo temporal entre dos imágenes sucesivas permite obtener una mayor resolución en velocidad en el campo de VM lo que a su vez permite representar con mayor precisión el desplazamiento de los sistemas precipitantes. Sin embargo, al incrementar dicho intervalo disminuye la capacidad de identificar y seguir los sistemas dado que cuanto mayor es el tiempo que transcurre entre dos imágenes sucesivas, mayores son los cambios que experimenta el sistema convectivo en términos de forma e intensidad, lo cual puede afectar negativamente la correcta asociación entre una determinada región del sistema y su continuación en un tiempo posterior. En la Figura 9 se observa que el pronóstico correspondiente a un intervalo temporal de 10 minutos presenta un mejor desempeño en la mayoría de los casos, con la excepción de los plazos de pronósticos más cortos y el umbral de reflectividad más alto durante la etapa de iniciación. Esto se observa aproximadamente a partir de los 20 minutos de plazo de pronóstico y se evidencia cada vez más a medida que avanzaba el tiempo de pronóstico. Esto sugiere que un intervalo de 10 minutos corresponde a un adecuado balance entre la resolución con la cual se estiman los VM y la capacidad de la técnica de identificar correctamente la continuidad del campo de reflectividad en imágenes sucesivas. La mayor resolución del campo de VM permite obtener un mayor detalle en el movimiento del sistema precipitante cuando se realiza la extrapolación del mismo lo que se traduce a una mejor performance del pronóstico obtenido. En términos del costo computacional, el mismo se incrementa con el aumento del intervalo utilizado, dado que se incrementan los desplazamientos máximos permitidos para la comparación entre los bloques (imáx y jmáx). A modo de ejemplo, el tiempo empleado para el cálculo de los VM es de 33.38 segundos en el caso de un intervalo temporal de 5 minutos y de 117.03 segundos en el caso de un intervalo temporal de 10 minutos.

Figura 11: ETS en función del plazo de pronóstico para los pronósticos generados a partir de los vectores de movimiento estimados con un intervalo temporal de 10 minutos (rojo) y 30 minutos (verde) para los umbrales de 15 dBz (líneas continuas) y 50 dBz (líneas punteadas), para las etapas de iniciación (a) y madurez (b).
4. CONCLUSIONES
En el presente trabajo se realiza un análisis de sensibilidad a diferentes parámetros de un algoritmo de pronóstico a corto plazo basado en la extrapolación de ecos de radar para un caso asociado a la presencia de un sistema convectivo en la zona central de Argentina. Para alcanzar el objetivo propuesto se desarrolló un código propio para el cálculo de movimiento a partir de las imágenes sucesivas de reflectividad y para el cálculo de la advección del campo de reflectividad siguiendo un esquema de extrapolación semi-lagrangiano.
La modificación propuesta en el presente trabajo a la versión original del algoritmo TREC permitió obtener un campo de movimiento con menor ruido en la estimación de los VM que permitió a su vez obtener una mayor performance de los pronósticos asociados. También se observó que a medida que aumentaba el plazo de pronóstico los detalles de menor escala ocasionan una disminución del desempeño del pronóstico dado que estas son menos predecibles. Por esto, el valor óptimo para el tamaño de bloque depende del plazo de pronóstico. Existen diversos trabajos en los que se desarrollan diferentes técnicas para considerar la predictibilidad de las diferentes escalas espaciales. Turner et al. (2004) definieron un filtro de pronóstico en el que se separa la influencia de cada escala espacial para los diferentes plazos de pronóstico, para esto separan las contribuciones de cada escala al error del pronóstico. Los pronósticos obtenidos una vez aplicado el filtro reflejan la falta de previsibilidad de escalas pequeñas asociadas con intensidades más altas para los plazos de pronóstico más largos. Por ello a medida que la información de pronóstico sobre estructuras más pequeñas del sistema precipitante se vuelve imprecisa, el filtro utilizado elimina estos detalles para reducir la medida del error de pronóstico. Un mayor intervalo temporal entre las imágenes de reflectividad permitió obtener una mayor resolución del campo de VM que describe el movimiento del sistema precipitante, sin embargo al aumentar este intervalo temporal, las celdas convectivas sufren mayores cambios en su movimiento, forma e intensidad que dificultan su reconocimiento a través de ese período.
La principal limitación de la técnica de extrapolación propuesta reside en el comportamiento que mantiene el sistema de precipitación. La técnica no es capaz de identificar áreas de iniciación e intensificación de los sistemas precipitantes, por lo que en la etapa de desarrollo del sistema se debe buscar otra alternativa para la obtención de información detallada acerca de su próxima ubicación e intensidad. Por otro lado, la técnica empleada presenta resultados ruidosos en el campo de movimiento cuando se analizan los detalles de menor escala asociados al desplazamiento y deformación de los sistemas precipitantes. Una de las ventajas de este tipo de técnicas reside en que, una vez desarrollado el sistema, logra brindar información detallada respecto a la intensidad y dirección de velocidad de desplazamiento del sistema. Así también, el costo computacional para su cálculo no es elevado, por lo que es factible su implementación operativa lo cual se espera, tenga un impacto positivo sobre los pronósticos de precipitación a muy corto plazo y sobre los avisos y alertas por posible ocurrencia de fenómenos severos.
Actualmente se está trabajando con datos del radar de Anguil (La Pampa, Argentina) en un rango más amplio de situaciones incluyendo sistemas precipitantes de tipo estratiforme y convectivo que permitan tener un conocimiento más preciso de la aplicación de la técnica en nuestra región. Se pretende tener un mejor conocimiento de la performance del algoritmo al utilizar observaciones reales de radar, dado que la utilización de observaciones sintéticas puede llevar a una sobreestimación de la performance de la técnica. Un aspecto fundamental en todo sistema de pronóstico es la cuantificación de su incertidumbre. En trabajos futuros se implementarán y evaluarán técnicas que permitan estimar la incertidumbre asociada a los pronósticos a corto plazo basados en la extrapolación de datos de radar.
Agradecimientos
El presente trabajo fue realizado en el marco de una beca de estímulo de la Universidad de Buenos Aires y continúa por una beca de doctorado del CONICET. Las actividades son financiadas por los proyectos PIDDEF 16/2014, ANPCyT PICT 2013-1299, PICT 2014-1000, CONICET Cooperación Internacional 787/17, CONICET-FAPESP SPRINT 2016/50458-1, UBACyT 20020130100618BA, UBACyT 20020130100820BA y el Proyecto de Desarrollo Tecnológico Social ALERT.AR.
REFERENCIAS
1. Bellon, A., y G. L. Austin., 1978: The evaluation of Two years of real-time operation of a short-term precipitation forecasting procedure (SHARP). Journal Applied Meteorology, 17, 12, 1778–1787.
2. Bowler, N. E., Pierce, C. E., Seed, A. W., 2006: STEPS: A probabilistic precipitation forecasting scheme which merges an extrapolation nowcast with downscaled NWP. Quarterly Journal of the Royal Meteorological Society, 132(620), 2127-2155. [ Links ]
3. Da Silva Farias, J. F., y Pereira Filho, A., 2013: Previsão de chuva a curtíssimo prazo na área de abrangência do radar meteorológico de São Paulo. Revista Brasileira de Meteorologia, 28, 2, 199-209. [ Links ]
4. Dixon, M., y Wiener, G., 1993: TITAN: Thunderstorm Identification, Tracking, Analysis, and Nowcasting—A Radar-based Methodology. Journal of Atmospheric and Oceanic Technology, 10, 6, 785-797.
5. Germann, U., y Zawadzki, I., 2002: Scale-Dependence of the Predictability of Precipitation from Continental Radar Images. Part I: Description of the Methodology. Monthly Weather Review, 130, 12, 2859–2873.
6. Giménez D., y Marcor J., 2015: Desarrollo de un modelo de nowcasting operacional para prevision de tormentas severas: primer avance. XII Congreso Latinoamericano e Iberico de Meteorología, Mar del Plata, Argentina. [ Links ]
7. Golding, B. W., 1998: Nimrod: A system for generating automated very short range forecasts. Meteorological Applications, 5(1), 1-16. [ Links ]
8. Handwerker, J., 2002: Cell tracking with TRACE3D—A new algorithm. Atmospheric Research, 61(1), 15-34.
9. Johnson, J. T., MacKeen, P. L., Witt, A., Mitchell, E. D. W., Stumpf, G. J., Eilts, M. D., Thomas, K. W., 1998: The storm cell identification and tracking algorithm: An enhanced WSR-88D algorithm. Weather and forecasting, 13(2), 263-276. [ Links ]
10. Kato, R., Shimizu, S., Shimose, K. I., Maesaka, T., Iwanami, K., Nakagaki, H., 2017: Predictability of meso--scale, localized, extreme heavy rainfall during the warm season in Japan using high-resolution precipitation nowcasts. Quarterly Journal of the Royal Meteorological Society, 143(704), 1406-1420. [ Links ]
11. Laroche, S., y Zawadzki I., 1994: A variational analysis method for retrieval of three-dimensional wind field from single-Doppler radar data. Journal of Atmospheric Sciences, 51, 18, 2664–2682.
12. Li, P. W., y Lai, E. S., 2004: Applications of radar-based nowcasting techniques for mesoscale weather forecasting in Hong Kong. Meteorological Applications, 11(3), 253-264. [ Links ]
13. Li, L., Schmid, W., y Joss, J., 1995: Nowcasting of Motion and Growth of Precipitation with Radar over a Complex Orography. Journal of Applied Meteorology, 34, 6, 1286-1300. [ Links ]
14. Liang, Q., Feng, Y., Deng, W., Hu, S., Huang, Y., Zeng, Q., y Chen, Z., 2010: A composite approach of radar echo extrapolation based on TREC vectors in combination with model-predicted winds. Advances in Atmospheric Sciences, 27(5), 1119-1130. [ Links ]
15. Lohigorry, P., de Elía, R., Russian, G., 2018: Pronósticos a muy corto plazo en el Servicio Meteorológico Nacional. Nota Técnica SMN 2018-46. [ Links ]
16. Mueller, C., Saxen, T., Roberts, R., Wilson, J., Betancourt, T., Dettling, S., Yee, J., 2003: NCAR auto-nowcast system. Weather and Forecasting, 18(4), 545-561. [ Links ]
17. Otsuka, S., Tuerhong, G., Kikuchi, R., Kitano, Y., Taniguchi, Y., Ruiz, J. J., Miyoshi, T., 2016: Precipitation Nowcasting with Three-Dimensional Space-Time Extrapolation of Dense and Frequent Phased-Array Weather Radar Observations. Weather and Forecasting, 31, 1, 329-340. [ Links ]
18. Otsuka, S., Kotsuki, S., y Miyoshi, T., 2016: Nowcasting with data assimilation: A case of global satellite mapping of precipitation. Weather and Forecasting, 31(5), 1409-1416. [ Links ]
19. Radhakrishna, B., Zawadzki, I., y Fabry, F., 2012: Predictability of precipitation from continental radar images. Part V: Growth and decay. Journal of the Atmospheric Sciences, 69(11), 3336-3349. [ Links ]
20. Reyniers, M., 2008: Quantitative Precipitation Forecasts based on radar observations: principles, algorithms and operational systems. Nota técnica del Royal Meteorological Institute of Belgium. [ Links ]
21. Rinehart, R. E., y Garvey, E. T., 1978: Three-dimensional storm motion detection by conventional weather radar. Nature, 273, 5660, 287-289. [ Links ]
22. Robert, A., 1981: A stable numerical integration scheme for the primitive meteorological equations. Atmosphere-Ocean, 19, 1, 35–46.
23. Seed, A. W., 2003: A dynamic and spatial scaling approach to advection forecasting. Journal of Applied Meteorology, 42, 3, 381–388.
24. Sobash, R. A., y Stensrud, D. J., 2013: The impact of covariance localization for radar data on EnKF analyses of a developing MCS: Observing system simulation experiments. Monthly Weather Review, 141(11), 3691-3709. [ Links ]
25. Sokol, Z., Mejsnar, J., Pop, L., y Bližnák, V., 2017: Probabilistic precipitation nowcasting based on an extrapolation of radar reflectivity and an ensemble approach. Atmospheric Research, 194, 245-257.
26. Torres-Molina, L., S. Cruz-Pol, J. Colom, 2016: Flood alert system using high resolution radar data in the Mayaguez-Puerto Rico Bay drainage system. 2016 AMS Annual Meeting, 10-14 enero 2016, New Orleans, USA. [ Links ]
27. Turner, B. J., Zawadzki, I. y Germann, U., 2004: Predictability of precipitation from continental radar images. Part III: Operational nowcasting implementation (MAPLE). Journal of Applied Meteorology, 43(2), 231-248. [ Links ]
28. Vidal, L., 2014: Convección extrema sobre Sudamérica: estructura interna, ciclos de vida e influencia de la topografía en la iniciación. Tesis Doctoral de la Universidad de Buenos Aires en el área de Ciencias de la Atmósfera y los Océanos, Facultad de Ciencias Exactas y Naturales, UBA. [ Links ]
29. Wang, Y., Meirold-Mautner, I., Kann, A., Šajn Slak, A., Simon, A., Vivoda, J. y Giszterowicz, M., 2017: Integrating nowcasting with crisis management and risk prevention in a transnational and interdisciplinary framework. Meteorologische Zeitschrift, 459-473.
30. Wilson J., N. A. Crook, C.K. Mueller, J. Sun, y M. Dixon, 1998: Nowcasting Thunderstorms: A Status Report. Bulletin of the American Meteorological Society, 79, 10, 2079 – 2099.
31. Woo, W. C., y Wong, W. K., 2017: Operational application of optical flow techniques to radar-based rainfall nowcasting. Atmosphere, 8(3), 48. [ Links ]
32. Zawadzki, I., 1984: Factors affecting the precision of radar measurement of rain, in 22 Conference on radar meteorology, edited by AMS, pp. 251-256, Zurich, Switzerland. [ Links ]
33. Zipser, E. J., Liu, C., Cecil, D. J., Nesbitt, S. W., y Yorty, D. P., 2006: Where are the most intense thunderstorms on Earth? Bulletin of the American Meteorological Society, 87, 8, 1057-1071. [ Links ]

