










Servicios Personalizados
Revista

Articulo
 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkGeoacta
versión On-line ISSN 1852-7744
Geoacta vol.39 no.1 Ciudad Autónoma de Buenos Aires jun. 2014
TRABAJOS DE INVESTIGACIÓN
Una revision de la polarimetria y los efectos ionosfericos sobre los sistemas sar, insar y palsar: requerimientos y metodos de correccion
Review of polarimetric and ionospheric effects on sar, insar and palsar systems: requirements and correction methods
Víctor Hugo Rios1
1 Departamento de Física, Universidad Nacional de Tucumán, CONICET. Argentina.
E-mail: vhrios@uolsinectis.com.ar
RESUMEN
Este estudio proporciona una actualización de las herramientas polarimétricas que se utilizan actualmente para la extracción óptima de la información a partir de imágenes de Radares de Apertura Sintética, SAR, de imágenes Interferométricas de SAR, InSAR e imágenes polarimétricas de SAR en la banda L, PALSAR. Los fundamentos de la teoría polarimétrica son discutidos en el contexto del radar de apertura sintética (SAR). Se revisa la calibración polarimétrica SAR, que es un tema importante para la extracción de información. Es considerada la extracción de información usando los parámetros de ondas dispersadas recibidas. Se proponen algunos esquemas de corrección ionosférica para las ondas transmitidas por el radar de apertura sintética (SAR) y para la interferometría SAR polarimétrica (PolInSAR) en el espacio. La variación temporal y espacial de la densidad de electrónica en la alta atmosfera afecta la propagación del pulso de radar dando lugar a distorsiones de la imagen. Se estima el Contenido Electrónico Total (CET) mediante la aplicación de la ecuación de Appleton-Hartree debido a distorsiones de enfoque, polarimetría e interferometría. Se propo-ne un estimador combinado que produce estimaciones diferenciales de CET. Se discute además el efecto de la estructura vertical de la ionosfera desde la fase interferométrica y se describen instrucciones importantes para la investigación futura.
Palabras claves: SAR; POLInSAR; CET; RF (Rotacion Faraday).
ABSTRACT
This study provides an update of the polarimetric tools currently used for optimal extraction of information from polarimetric SAR (Synthetic Aperture Radar), INSAR (Interferometric Synthetic Aperture Radar) and PALSAR (Phase Array L-band Synthetic Aperture Radar) imagery. The fundamentals of polarimetric theory are discussed in the context of synthetic aperture radar (SAR). Polarimetric SAR calibration, which is important for the extraction of subject information, is reviewed. Extraction of information using the received scattered wave is considered. Some schemes for ionospheric correction to synthetic aperture radar (SAR) and the wave interferometry (PolInSAR) are proposed. Temporal and spatial variations of the electronic density in the upper atmosphere affect radar pulse propagation and, thereby, result in distortion of the image. Due to distortions of focus, polarimetry and interferometry, the Total Electron Content (TEC) has been estimated by applying the Appleton-Hartree equation. We propose a combined estimator that reliably estimates of TEC differentials. We also discuss the effect of the vertical structure of the ionosphere from the interferometric phase and outline important avenues for future research.
Keywords: SAR; PolInSAR; TEC; FR (Faraday Rotation).
INTRODUCCIÓN
El Radar es un sistema de sensoramiento remoto activo, que emite su propia energía en el intervalo de frecuencias de microondas y recibe los ecos de la señal reflejada por los objetos observados desde plataformas aéreas o satelitales. La principal diferencia de los sistemas de radar frente a los sistemas ópticos y pasivos, es la capacidad de obtener imágenes sin necesidad de energía solar; así mismo, opera independiente de las condiciones atmosféricas, ofrece mayor información sobre la textura del terreno y cuenta con la posibilidad de obtener información sobre los sustratos inferiores de las coberturas boscosas.
El desarrollo de los sistemas de radar ha sido impulsado por la misma necesidad de obtener datos espaciales en zonas de difícil acceso y de alta nubosidad. Para este fin se han desarrollado investigaciones enfocadas no solo a mejorar las características de estas imágenes y sus parámetros de captura, sino también, a optimizar las formas y procesos de extracción de información temática.
Las imágenes de radar proveen altos volúmenes de datos, ofrecen observación periódica y una amplia perspectiva de la superficie de la Tierra y sus recursos, además de permitir evidenciar los rasgos de las actividades humanas y su impacto. Es así como en la actualidad se puede disponer de imágenes de radar libres de nubes cada 2 ó 3 días, en modos de multi-polarización con diferentes ángulos de observación. También, el aumento que ha sufrido su resolución espacial, que pasó de 10 m hasta 3 y 1 m, como es el caso de las imágenes de los sistemas canadiense Radarsat 2 y el alemán Terrasar X, respectivamente 4.
A lo largo de la historia y del desarrollo de esta tecnología, se puede observar un proceso rápido y dinámico de crecimiento. Inicialmente, los radares eran de Apertura Real (RAR -Real Aperture Radar-), que emitían en el rango del espectro de microondas y luego registraban las señales de retorno de los objetos terrestres con una resolución espacial limitada y controlada por la longitud física de la antena.
Actualmente, los sistemas modernos de radar, utilizan las antenas sintéticas Synthetic Aperture Radar (SAR), que permiten mejorar la resolución espacial de la imagen mediante un sofisticado post-procesa-miento caracterizado por la simulación virtual del tamaño de la antena y la compresión de la señal utilizando los principios físicos del efecto Dopler. Adicionalmente, el perfeccionamiento de la capacidad polarimétrica de los radares los convierte en una opción competitiva frente a los sensores multiespectrales óptico-electrónicos.
La polarimetría de radar o medición y análisis de la polarización de la energía electromagnética, es una forma eficaz para la generación de imágenes realzando tanto los atributos como formas de los objetos en el terreno, lo que se constituye en un avance tecnológico importante para efectuar estudios sobre cultivos, bosques, dinámica del océano y de las costas, hidrografía, cartografía, entre otros.
De los últimos sistemas satelitales de radar, Envisat/SAR, Alos/Palsar y Terrasar X poseen la capacidad de combinar los diferentes modos de polarización con la que cuentan. No obstante, solo el programa canadiense Radarsat 2, ofrece actualmente las imágenes con lo que se denomina polarización total o Quad polarization, incluyendo las mediciones de la amplitud y la fase de la onda electromagnética retro-dispersada. Este sistema cuenta con tres (3) modos de polarimetría: Polarización selectiva (dual polarization) suministro de imágenes con polarización simple horizontal (HH) o vertical (VV) en combinación con la polarización cruzada (HV o VH). Polarización simple (HH o VV) imágenes con alta resolución espacial (3 m). Polarización completa (Quad polarization) obtiene imágenes HH, VV, HV o VH.
Recientes investigaciones internacionales han establecido que la polarimetría de radar y específicamente la polarización total u óptima, representa un importante canal de tecnología de sensoramiento remoto para obtener información geoespacial sobre los recursos naturales de la Tierra y de esta manera estudiar diferentes procesos y fenómenos biofísicos con mayor eficiencia. Tales son los casos del trabajo de Sauer et al., (2007), Raimadoya y Trisasongko, (2007) y Souyris et al., (2007). Las ventajas implícitas de utilizar las nuevas imágenes polarimétricas de radar en diferentes campos de la percepción remota, tales como agricultura, silvicultura, hidrología, detección de cambios en las líneas costeras, monitoreo de océanos, detección de derrames de petróleo y detección de navíos, entre otras aplicaciones ver en Sokol, J., NcNairn, H., and Pultz, T.J., (2002).
El vector campo eléctrico varía su dirección en el tiempo, describiendo en general una elipse en un plano transversal a la de propagación, jugando un papel esencial en la interacción de las ondas electromagnéticas "ondas vectoriales", con cuerpos materiales y con el medio de propagación. Considerando este comportamiento de la polarización, expresado en términos de la elipse de polarización, se denomina elipsometría en la detección óptica e imágenes (Azzam, 1977; Born and Wolf, 1959), y se llama polarimetría en la detección de ondas de radar y lidar e imágenes (Cloude and Pottier, 1996; Boerner et al.,1998; Deschamps, 1951). Por lo tanto, elipsometría y polarimetría, que utilizan los conceptos básicos de la polarización de las ondas electromagnéticas introducido en el siglo XIX y al principio del siglo XX (Born and Wolf, 1959), se refieren a la caracterización de las propiedades de polarización de las ondas ópticas y de radar, respectivamente. La elipsometría comenzó una nueva era en la década de 1940 con la llegada importante de dispositivos de control de la fase de la polarización óptica y de radar y el desarrollo asociado de la elipsometría matemática, tales como la introducción de "la dispersión coherente hacia adelante de Jones, matrices de 2x2 y la densidad de potencia media asociada a las matrices de propagación de Mueller (Stokes), 4x4". La investigación en polarimetría se convirtió en activa durante la década de 1940 con la introducción de la tecnología de polarización dual de antenas, y la posterior formulación de la matriz 2x2 de retrodispersión de radar coherente, matriz de Sinclair y la densidad de potencia de retro-dispersión de radar asociada a la matriz de Kennaugh 4x4, como se resume en detalle en (Boerner et al., 1998). Basado en el trabajo pionero y original de Kennaugh, Huynen desarrolló un "enfoque fenomenológico a polarimetría de radar", que tuvo un impacto muy sutil en el avance de la polarimetría y dio impulso al desarrollo, que sigue hoy en día. A partir de Huynen, se hicieron importantes contribuciones destinadas a las aplicaciones diversas de la polarización a fin de mejorar la capacidad de detección de los sistemas de radar. Una excelente contribución fue hecha en la década de 1980 por Boerner y sus colaboradores a través de estudios teóricos de las propiedades de la radiación de polarización de dispersión con respecto a la dispersión inversa y la identificación de blancos (Agrawal and Boerner, 1989; Boerner et al., 1981.; Boerner and Xi, 1990; Boerner et al., 1991; Boerner et al., 1993; Boerner et al., 1993; Davidovitz and Boerner, 1986; Foo et al., 1984).
En 1985, la polarimetría de radar comenzó una nueva era con la primera imagen de radar del polarímetro aerotransportado de NASA-JPL. Mientras que las primeras implementaciones de polarímetros de radar utilizan técnicas convencionales con la antena de polarización variable, el NASA-JPL SAR mide todos los elementos de la matriz de dispersión para cada 10 m x 10 m de resolución en un elemento de escena de 10 km x 10 km, casi al mismo tiempo. Un gran conjunto de datos fueron recogidos desde el CV990 de NASA y más tarde con el AirSAR, ellos fueron ampliamente distribuidos y analizados. Desde entonces, han aparecido otros polarímetros aerotransportados, tales como el ERIM P3 X, C, y la banda polarimétrica L de SAR , la CCRS Convair X-580, la banda C de SAR, el E-SAR S, L y la banda P de DLR , la banda C PHARUS SAR (Rios et. al., 2011), el EMISAR (Christensen et al., 1998), y más recientemente, la banda L Pi-SAR de NASDA / CRL y los ONERA / RAMSESP, L, S, C, X, y la banda polarimétrica de SAR Ku (una revisión de la polarimetría de radar aerotransportado y de sistemas SAR de satélites se puede ver en (Dubois-Fernandez et al., 2002). El servicio del "shuttle" de 10 días de la misión basada en el SIR-C de 1994 tiene habilitado el acceso al mayor conjunto de datos polarimétricos, y ha producido una amplia investigación sobre polarimetría y sus diversas aplicaciones. Contribuciones significativas de la polarización a la extracción de información y las técnicas de calibración de sensores aparecieron durante este período, y fueron concretados en números especiales de la IEEE (Transaction on Geoscience and Remote Sensing) y la Revista International Journal of Remote Sensing dedicada a la calibración, y aplicaciones polarimétricas que utilizan datos de AirSAR de JPL y SIR-C.
La importante literatura en el estudio de las ondas parcialmente polarizadas de la óptica (Born and Wolf, 1959), sirve como base para el avance de la teoría polarimétrica en el contexto de las imágenes de radar. Recientemente, un nuevo impulso a la teoría de polarimetría de radar fue dada por (Cloude, 1985; Cloude, 1986) con la introducción de la descomposición incoherente del blanco (Incoherent Target Descomposition, ITD). Las ITD de Cloude, han demostrado ser únicas, ver (Cloude, 1986) en contraste con la descomposición de Huynen, proporcionando herramientas independientes derivadas de la matriz de coherencia del blanco (Cloude, 1986). Estas herramientas, que incluyen la entropía (H) de VonNeuman (Cloude, 1986), la anisotropía (A) (Cloude, 1997), así como los parámetros de los autovectores α y β (Cloude and Pottier, 1996; Cloude and Pottier, 1997), fueron tomadas como una interpretación física sólida en referencia a los mecanismos de dispersión de blancos (Cloude, 1986; Cloude and Pottier, 1996; Cloude and Pottier, 1997). Los parámetros de Cloude son utilizados actualmente como herramientas estándar para la caracterización de blancos, y se han utilizado como base para el desarrollo de nuevos métodos de clasificación introducidos en el análisis de los datos polarimétricos (Ferro-Famil et al., 2001).
En cuanto a las imágenes SAR convencionales, las imágenes SAR polarimétricas se ven afectadas por speckle. El efecto del speckle en la estimación de parámetros polarimétricos fue investigado por primera vez por Goodman en óptica. Desde 1978, la investigación del efecto de speckle en las estadísticas de los parámetros polarimétricos ha sido un campo activo de la investigación en las imágenes SAR (Barakat, 1985; Eom and Boerner, 1991). Murza fue el primero en utilizar la distribución Wishart para obtener las estadísticas de los parámetros polarimétricos en imágenes SAR. Desde entonces, la distribución de Wishart ha sido ampliamente utilizada para evaluar el efecto de la multi-speckle como herramienta polarimétrica, y así también como base de la clasificación y segmentación de algoritmos (Ferro-Famil et al., 2001; Beaulieu and Touzi, 2003; Conradsen et al., 2003) en las técnicas de detección de bordes. El filtrado del speckle de imágenes SAR polarimétricas también ha sido un área activa de Investigación durante una década. Touzi y Lopes fueron los primeros en demostrar que el filtro convencional de un canal no puede preservar la información polarimétrica, y que el filtrado del speckle debe aplicarse en términos de la matriz de covarianza y no en términos de la matriz de dispersión. Así, han sido desarrollados diversos filtros que proporcionan una matriz de covarianza filtrada.
La polarimetría, área activa de investigación durante 50 años, ha sido resumida a fondo en varios libros y artículos de revisión (Azzam, 1977; Born and Wolf, 1959; Chandrasekhar, 1960). Una excelente revisión ha sido completada recientemente por Boerner et al. en el Manual of Remote Sensing (Boerner et al., 1998). Debido a la aparición de nuevos SAR polarimétricos por satélite, tales como RADARSAT-2, ALOS-PALSAR (Campbell and Wynne, 2011), y Terra SARX y las bandas L, es importante proporcionar una actualización de las herramientas polarimétricas que se utilizan actualmente para la extracción de información polarimétrica.
POLARIZACIÓN DE LAS ONDAS ELECTROMAGNÉTICAS MONOCROMÁTICAS PLANAS
Ecuación matemática de la Elipse
La polarización de una onda plana electromagnética monocromática describe la forma y la ubicación de la punta del vector eléctrico en un plano ortogonal a la dirección de propagación de la onda (Born and Wolf, 1959; Chandrasekhar, 1960). Sea un vector de posición de un punto P en el espacio iluminado por la onda, que se caracteriza por el vector de onda . La onda electromagnética está completamente caracterizada por los parámetros (magnitud, fase y dirección) de su vector eléctrico dado por (Born and Wolf, 1959; Boerner et al, 1981):

Donde: w es la frecuencia angular, δx y δy son las componentes de la fase de. Las correspondientes com-ponentes cartesianas E1 y E2 de la parte real del vector , son las siguientes: E1= axcos τ+δx
![]()
Donde: τ = wt - kz. Eliminando el parámetro τ entre las 2ecuaciones de (2) podemos encontrarla ecuación de la curva que describe el punto final del campo eléctrico en el plano (x, y) (Born and Wolf, 1959):
![]()
Donde: δ = δy - δx es la diferencia de fase entre las componentes . Para una onda monocromática, ax, ay y δ son constantes (que no dependen del tiempo), y la ecuación (3) corresponde a una elipse. Cuando la diferencia de fase δ es cero o un número múltiple de π, la elipse se reduce a una línea recta y la onda se dice que es linealmente polarizada. Cuando los dos componentes son de la misma magnitud, ax = ay, y se encuentran en cuadratura de fase, δ = ± π/2, la elipse se reduce a un círculo y la onda se dice que está polarizada circularmente (Born and Wolf, 1959).
CARACTERIZACIÓN DEL ESTADO POLARIZACIÓN
Vector de Jones
La Figura 1 (Freeman, 1992) representa la elipse dada por la ecuación (3) descripta en el plano de la onda
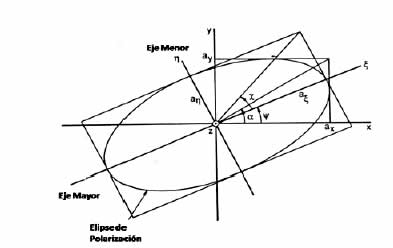
Figura 1. Elipse de polarización.
Figure 1. Polarization ellipse.
La elipse de polarización puede ser caracterizada usando tres cantidades independientes, ax, ay y δ o las tres entidades equivalentes independientes s0 = a2x + a2y, α = arc tan (ay / ax), y δ (Born and Wolf, 1959). También podría ser caracterizada por los ejes mayor y menor aξ , aη y el ángulo Ψ (0 < Ψ < π) que especifica la orientación de la elipse; o las tres entidades independientes equivalentes s0 = a2ξ + a2η = a2x + a2y, el ángulo de elipticidad χ= arc tan(aξ / aν), (-π/4 ≤ χ ≤ π/4), y el ángulo de orientación Ψ. Los ángulos de la elipse Ψ y χ están relacionados con los ángulos de la elipse de polarización α y δ por (Deschamps, 1951; Born and Wolf, 1959):
![]()
La polarización de la onda de la ecuación (1) es definida por el vector de Jones dada en las (Born and Wolf, 1959; Boerner et al., 1981).
Vector de Stokes
Fue en 1852, cuando Stokes demostró que una onda cuasi monocromática plana de luz puede ser caracterizada por cuatro parámetros reales y observables que ahora llevan su nombre (Born and Wolf, 1959):

Los tres parámetros independientes de la elipse de polarización (ax, ay, δ) están representados con los cuatro parámetros de Stokes s0, s1, s2, s3 y que corresponden a tres cantidades independientes desde (Deschamps, 1951):
![]()
Obsérvese que la fase absoluta δx no se conserva en la representación de Stokes. Los parámetros de Stokes fueron los primeros medios propuestos para describir la polarización en términos de cantidades observables (potencia) directamente (Born and Wolf, 1959). Usando la representación de Stokes, el estado de polarización puede ser unívocamente graficado para un punto P de coordenadas cartesianas (s1, s2, s3) en una esfera de radio s0 (intensidad del campo eléctrico) llamado esfera de Poincaré. El concepto de la representación del estado de polarización de una onda como un punto de la esfera, fue creado originalmente por Poincaré para describir el estado de polarización de la luz, y luego Deschamps las adaptó para las ondas de radio y antenas (Deschamps, 1951) y ello demostró ser conveniente para la representación y resolución de problemas de polarización tales como la adaptación de transmisión y recepción de polarizaciones entre antenas (Deschamps, 1951; Deschamps, 1973). El estado de polarización normalizada correspondiente a una elipse de ángulos (Ψ, χ) se puede asignar como un punto en la esfera de Poincaré de radio unidad de latitud 2Ψ y longitud 2χ, como se ve en la Figura 2 (Freeman, 1992). Debido a que el signo de χ determina el estado de polarización, se muestra que el hemisferio superior (correspondiente χ > 0) la polarización es mano izquierda y el hemisferio inferior muestra polarizaciones diestras, de acuerdo con la definición estándar del IEEE. Los polos representan las polarizaciones circulares, mientras que polarizaciones lineales están representados por puntos en el plano ecuatorial (Deschamps, 1951).
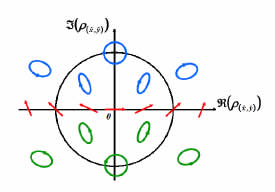
Figura 2. Mapa de Poincare.
Figure 2. Poincare Map.
CARACTERIZACIÓN DE LAS ONDAS PLANAS PARCIALMENTE COHERENTES
Ondas cuasi-monocromáticas parcialmente polarizadas
La transmisión de ondas con SAR, se hará dentro una banda estrecha (Curlander and McDonough, 1991) donde las ondas transmitidas y recibidas están en la banda estrecha alrededor de la frecuencia media central:
![]()
En este caso, la onda puede ser todavía interpretada como una onda plana, se dice que es cuasi monocro-mática, y las componentes E1 y E2 de la parte real del vector �� en cada punto están dadas por (Born and Wolf, 1959; Barakat, 1985):
![]()
Donde: denota la frecuencia media, es el vector de onda media. ax(t), ay(t), δx(t) y δy(t)- varían lentamente en comparación con el término periódico exp(j(w t). La antena receptora mide la banda estrecha la onda dispersada por el blanco durante un intervalo de tiempo T, llamado el tiempo de integración acimutal. Si esta medición de tiempo es pequeña en comparación con el tiempo de coherencia del blanco (Born and Wolf, 1959), las cantidades de la elipse ax(t), ay(t), δx(t) y δy(t) pueden suponerse que son constantes; y la onda se comporta en el intervalo de tiempo T como una onda monocromática con frecuencia media (Born and Wolf, 1959). Alguno de los vectores ya sea el de Jones o el de Stokes, pueden ser utilizados para caracterizar la polarización de la onda monocromática que está completamente polarizada. Sin embargo, para un intervalo de tiempo más largo los parámetros anteriores son variables en el tiempo, y la onda se dice que es parcialmente polarizada (Born and Wolf, 1959). En este caso, los parámetros que caracterizan la onda de polarización deberán ser promediados; y sólo son significativos bajo condiciones de estacionariedad en el sentido amplio y de ergodicidad de la señal. La información proporcionada por la correlación temporal de las componentes del campo eléctrico y así también la matriz de coherencia, en lugar del campo eléctrico, son necesarios a fin de caracterizar la onda parcialmente polarizada (Born and Wolf, 1959; Graves et al., 2007).
La matriz de coherencia para la representación de ondas parcialmente polarizadas
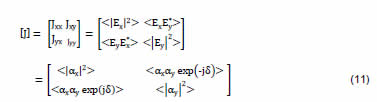
La matriz de coherencia es una herramienta interesante que permite medir parámetros observables de una onda parcialmente polarizada. Con ondas cuasi-monocromáticas las oscilaciones rápidas de la onda exp (j(w t)) se cancelan, y el campo eléctrico complejo de la señal está íntimamente relacionado con las variaciones de la envolvente (Born and Wolf, 1959; Barakat, 1985). Los parámetros de los campos eléctricos deben ser ahora promediados, bajo el supuesto de una señal estacionaria y la condición de ergodicidad, a fin de determinar cantidades medibles que puedan caracterizar la polarización de onda. Para generar una cantidad observable, existe una forma cuadrática del producto de E y E *; la intensidad total promedio de E *T.E , y su matriz de coherencia Hermitiana, (2x2) (Born and Wolf, 1959; Graves et al., 2007; Khorram et al., 2012):
![]()
Los paréntesis angulares <..> Indican un conjunto promediado y puede ser reemplazado por un momento promedio si se asume la condición de ergodicidad. [J] es una matriz Hermitiana positiva semi-definida (es decir, tiene autovalores no negativos). El hecho de que [J] = [J]*T hace que [J] sea una cantidad observable, y en la práctica el valor promedio temporal de [J] sea medible. La traza s0 de la matriz [J] representa la intensidad total de la onda (Born and Wolf, 1959; Graves et al., 2007):
![]()
La matriz coherencia [J], llamada también el tensor de correlación, fue introducida originalmente para la descripción de ondas polarizadas parcialmente cuyo campo electromagnético era estacionario. Esta matriz es equivalente a la matriz de densidad de VonNeuman que fue ampliamente utilizada en la mecánica cuántica. E. Wolf ha mostrado (Born and Wolf, 1959) que los cuatro elementos de la matriz de coherencia [J] están asociados únicavomente con la onda; y el conjunto único obtenido está íntimamente relacionado con el grado apropiado de coherencia de los campos eléctricos en dos direcciones ortogonales:
Si los ejes x e y son rotados alrededor de la dirección de propagación, la matriz de coherencia sufre cambios. Sin embargo, el determinante |J| de [J], los dos valores propios reales no negativos λ1 y λ2, como así también la traza de la matriz de coherencia Hermitiana [J] son invariantes ante la rotación. La combinación de estas entidades conduce a un parámetro de rotación invariante, llamado el grado depolarización de la onda, dado por (Born and Wolf, 1959; Graves et al., 2007):
![]()
Los autovalores de [J], λ2 y λ1, corresponden a los valores extremos de la intensidad total (Born and Wolf, 1959). El parámetro invariante de rotación, p, posee un significado físico (Born and Wolf, 1959; Graves et al., 2007) , corresponde a la relación entre la intensidad de una onda completamente polarizada respecto a la intensidad total de la onda. La onda se considera que está completamente polarizada si |J|= 0; esto corresponde a p= 1. La onda se dice que no es polarizada completamente si la intensidad de sus componentes en cualquier dirección perpendicular a la dirección de propagación es una constante. En este caso, la matriz de coherencia es diagonal; y los dos elementos de la diagonal son idénticos, lo que lleva a que p= 0.
El vector de Stokes en la representación de ondas parcialmente polarizadas
Una onda parcialmente polarizada también se puede caracterizar por cuatro parámetros de Stokes promediados temporalmente a partir de la ecuación (7), ya que están relacionados con los elementos de la matriz de coherencia

La correspondencia uno-a-uno entre la matriz de coherencia y el vector de Stokes permitió a Wolf extender los parámetros de Stokes y entre sus resultados encontró que la matriz de coherencia estaba asociada con la onda y presentó así un conjunto único de parámetros de Stokes para caracterizar una onda parcialmente polarizada. La condición de no negatividad satisfecha por el determinante de la matriz de coherencia [J] expresada en términos de los parámetros de Stokes implica (Born and Wolf, 1959; Khorram et al., 2012):
![]()
y el grado de polarización de la ecuación (14) viene dada por:
![]()
El grado de polarización fue calificado como el parámetro más importante asociado con el estado de polarización parcial de ondas en óptica. Esta herramienta ha sido aplicada con éxito para la dispersión y caracterización de blancos, como se explica a continuación.
CARACTERIZACIÓN MATEMÁTICA DE BLANCOS MEDIANTE DISPERSIÓN
Matriz de dispersión
El dispersor iluminado por la onda transmitida del SAR re-irradia una onda dispersada (Figura 3), que puede ser considerada como una onda esférica en una zona lejana al dispersor (Freeman, 1992). Esta onda se puede aproximar por una onda plana sobre el área relativamente pequeña ocupada por la antena de recepción. Los campos eléctricos E s y E i de la onda dispersada y la onda incidente están relacionados por la matriz de dispersión compleja [S], 2x2 del blanco dispersor:
![]()
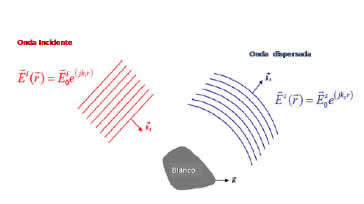
Figura 3. Interacción de una onda electromagnética y un blanco.
Figure 3. Interaction of an electromagnetic wave and a target.
Donde: r es la distancia entre el blanco y la antena. Aquí se usa la convención de alineación retrodispersada (BSA), que ha sido el sistema preferido en el área monoestática de la polarimetría. En SAR se utiliza la matriz de dispersión definida en la ecuación (18) que relaciona la onda dispersada cerca de la antena de recepción, a la onda incidente alejándose de la antena de transmisión.
La matriz [S], que se expresa en las coordenadas de BSA se conoce como la matriz de Sinclair [12], y se da en la base de polarización horizontal-vertical (h, v) por (Boerner et al., 1998; Rios et al., 2011):
![]()
Shv denota la transmisión de una antena de polarización horizontal y de una antena receptora de polariza-ción vertical. [S] se convierte en simétrica si el blanco es recíproco, es decir Shv = Svh.
CORRECCIÓN POR DISTORSIONES IONOSFÉRICAS EN DATOS POLARIMÉTRICOS SAR DE BAJA FRECUENCIA
Uno de los objetivos importantes de las próximas misiones de teledetección espacial es el control preciso y continuo de la distribución de la biomasa terrestre por medio de imágenes polarimétricas de bajas frecuencias SAR. Las microondas de baja frecuencia se caracterizan por una mayor capacidad de penetración a través del follaje de la vegetación, como así también la mayor estabilidad temporal facilita el monitoreo de la vegetación por medio de SAR e InSAR. Sin embargo, la distorsión debido a la ionosfera no es despreciable. En este sentido la estimación y compensación de los efectos ionosféricos es crítico para el éxito de esas misiones. La distribución espacial y temporal del Contenido Electrónico Total (CET) se usa como parámetro clave que caracteriza el impacto de la ionosfera en las adquisiciones de imágenes SAR e InSAR. Al mismo tiempo, los parámetros del sistema, tales como la frecuencia de la portadora f0, el ancho de banda del sistema ω, el ángulo de incidencia θ; y la polarización son factores importantes a estudiar. Cada distorsión es formulada como una función de los parámetros CET y del sistema.
Impacto ionosférico sobre el SAR, InSAR
Ecuación de Appleton-Hartree
El impacto de la ionosfera sobre las señales SAR e InSAR y las correspondientes imágenes puede ser obtenida a partir de la ecuación de Appleton-Hartree (Xu et al., 2004; Meyer, 2010; Yeh and Liu, 1972; Rios et al., 2010; Meyer and Nicoll, 2008; Iannini, 2013; Meyer and Nicoll, 2007). La ecuación de Hartree-Appleton puede ser aproximada para las condiciones de las ondas transmitidas SAR en el espacio, de la siguiente manera:
![]()
Rotación Faraday diferencial
La Rotación Faraday (RF) se debe a la naturaleza anisotrópica de la ionosfera ocacionada por el campo magnético terrestre. La diferencia entre los dos índices de refracción ionosféricos (onda ordinaria y extra-ordinaria), se obtiene a partir de la ecuación (20):

Mediante la integración de la ecuación (21) a lo largo de la Línea de Visión Directa (LVD) se obtiene la dife-rencia de fase entre las dos ondas que caracterizan la ionosfera
![]()
Aquí Ω representa el ángulo de Rotación Faraday (RF), dl es el elemento de longitud infinitesimal; y el intervalo de integración va desde el punto de observación hasta el satélite, y S representa la distancia desde el punto de observación al satélite. En la Fig. 4b se muestra el giro del plano de polarización de la onda y en la Figura 4a la RF en función de la frecuencia para las principales bandas que trabajan los radares polarimétricos (Yeh and Liu, 1972).
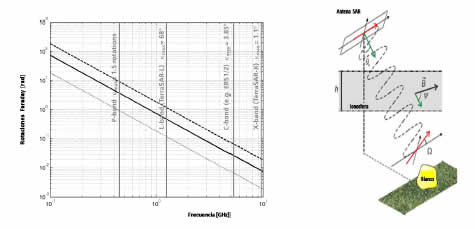
Figura 4. a). Bandas RF P, L, C y X. b). Esquema de la RF.
Figure 4. a). RF bands P, L, C and X. b). Scheme of the FR. 99
Una vez que definimos el CET como CET= N dl, obtenemos:
![]()
Como consecuencia de la ecuación (22), la elipse de polarización de los pulsos transmitidos y recibidos giran un ángulo Ω ya que se propagan a través de la ionosfera. En consecuencia, la matriz S de dispersión medida se distorsiona. Cada canal de un SAR quad-pol linealmente polarizado, (Meyer and Nicoll, 2007; Lavalle, 2009; Tsynkov, 2013) se entremezcla en un arreglo con la RF, Ω de la siguiente manera:

Donde: SPQ(Ω) y SPQ representan los elementos de la matriz medida y de la matriz de dispersión original respectivamente, para transmitir la polarización q y recibir la polarización p. Una vez que se estima Ω, los elementos de la matriz de dispersión original S pueden ser adquiridos de la matriz de dispersión S (Ω) medida a partir de las ecuaciones (23). La RF se puede estimara partir de los datos SAR principales y esclavos por separado. Su diferencia es la RF diferencial, que puede convertirse en el CET de acuerdo con la ecuación (22).
Cambio en el Acimut
Las variaciones acimutales del CET (Klimenko et al., 2005; Meyer and Nicoll, 2008; Freeman et al., 2009) inducen cambios en las posiciones del acimut de las imágenes SAR. La posición del centrado acimutal se determina a partir de la relación temporal Doppler. La relación Doppler ideal (Curlander and McDonough, 1991, Ouchi, 2013) en ausencia de efectos ionosféricos es:
![]()
Donde: Δf es la frecuencia Doppler, f0 es la frecuencia de la portadora, vrel es la velocidad relativa entre la antena y el blanco, v es la velocidad del sensor de SAR, R0 es la distancia donde el Doppler es nulo; y Df es la tasa de corrimiento Doppler. Cuando el CET varía a lo largo de la dirección acimutal (Fig. 5a), se introduce una componente adicional de fase (Curlander and McDonough, 1991; Ouchi, 2013; Xu et al., 2004) en la ecuación (24), tal que:
![]()
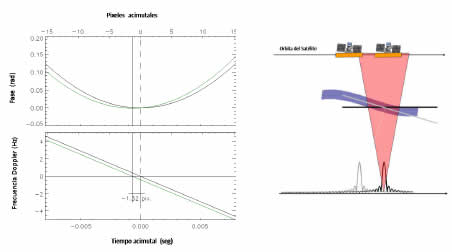
Figura 5. a). Cambio de fase y doppler con el acimut. b). Cambio del CET ~ 5 UCET/ 100 km.
Figure 5. a). Doppler and phase shift with azimuth. b). CET Change ~ 5 TECU / 100 km.
simple, se conserva la relación, v : vpiercing = hs : hiono , donde v es la velocidad del satélite, hs y hiono son las alturas del satélite y de la ionosfera respectivamente.
En las Figuras 5a y b se observa el cambio de fase y la frecuencia Doppler con el acimut y la geometría in-volucrada respectivamente para un cambio en el CET de aproximadamente 5 UCET (Unidades de CET). La perturbación Doppler histórica se obtiene mediante la suma de las ecuaciones (24) y (25).
Suponiendo una geometría de estrabismo nulo, el blanco es focalizado en el momento que el acimut exhibe Doppler nulo. El cambio en el acimut (Curlander and McDonough, 1991) se encuentra como:
![]()
Si el acimut cambia con una dada tasa de variación debido a la ionosfera, las adquisiciones en una estación principal serán diferentes a las esclavas, en cuyo caso las posiciones centradas ya no son idénticas, lo que lleva a un desplazamiento, que puede inducir una de correlación del interferograma. En la Figura 6a y b (53) se muestran dos imágenes del ALOS-PalSAR de Collville, Alaska, antes y después de ajustar el cambio de acimut.
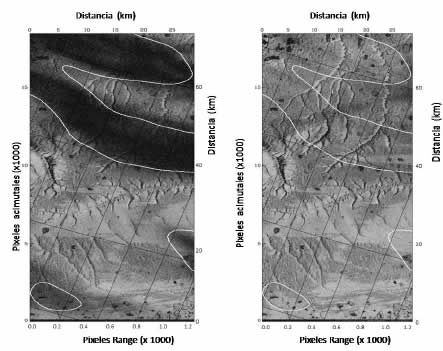
Figura 6. a). Imagen de Collville, Alaska antes (53). b). Después de la corrección de acimut (53).
Figure 6. a). Collville Image, Alaska before. b). Azimuth correction after.
La coherencia interferométrica maximiza cuando las dos Imágenes SAR se co-registran exactamente. El registro erróneo δAZ y la coherencia interferométrica están relacionados por:
![]()
La correlación de la imagen principal y esclava puede proporcionar una cantidad de errores de registro, y esta falta de coincidencia es posible corregir volviendo a muestrear la imagen esclava. La pérdida de γ, donde el CET cambia rápidamente (contornos en blanco) (Figura 6a) es casi totalmente recuperada (Klimenko et al., 2005; Meyer and Nicoll, 2008), después de la estimación del cambio de acimut introducido por la ionosfera (Figura 6b).
Fase interferométrica
Si existen cambios en el CET, una onda que atraviesa la ionosfera tendrá un avance en la fase, causando un cambio en la fase diferencial llamada fase interferométrica (Klimenko et al., 2005; Meyer and Nicoll, 2008; Egan, 2004). La interferometría de fase es inevitable en modos interferométricos de repetición. La integración de la ecuación (23) da la fase interferométrica φ.
![]()
utilizando la ecuación (22).
Correcciones y métricas
A fin de obtener correcciones en las imágenes esclavas adquiridas (Kim and Papathanassiou, 2010), han usado la teoría previa desarrollada; y los datos interferométricos del ALOS PAL-SAR adquiridos en el norte de Alaska en la primavera de 2007 (desde el 1ero de Abril al 17 de Mayo). La imagen de la estación esclava se muestra a la izquierda en la Figura 7 y usando las ecuaciones (25) se puede corregir la RF para cada canal de los datos adquiridos. Para ello usaron el estimador de Bickel y Bates obteniéndose la imagen del centro de la Figura 7. El resultado directo de una geometría de reflexión es la decorrelación completa entre los canales, es decir:
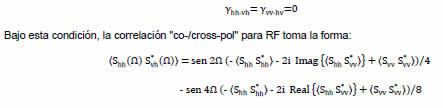
Bajo esta condición, la correlación "co-/cross-pol" para RF toma la forma:
La amplitud del primer término del miembro de la derecha es pequeño ya que ambos términos Shh Shh* y Svv Svv* son comparables y de signos opuesto, es por ello que contribuye a la amplitud el segundo término de la derecha siendo un número real. Excepto en zonas de grandes saltos en el acimut, la coherencia "co-/cross-pol" puede dar una buena corrección para RF.
El cambio de fase debido a la pantalla ionosférica, puede ser compensada cuando se realizan una buena medición del ΔCET. En la Figura 7, derecha, se muestra la imagen con la corrección ionosférica de la fase usando -ΔΩ. Existe todavía un error sistemático en el término de la fase que es visible aun después de la corrección.
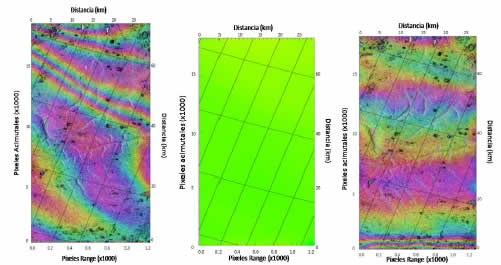
Figura 7. Imagen original de ALOS PAL-SAR (izquierda), rotación Faraday (centro) e imagen corregida (derecha).
Figure 7. ALOS PAL-SAR original image (left), Faraday rotation (center) and corrected image (right).
Estimador combinado de CET
El resultado de la estimación de ΔΩ proporciona la información sobre ΔCET, mientras que estimación del cambio de acimut Δa es proporcional a ∂ΔCET/∂x. En esta sección se describe como mejorar la estimación de ΔCET usando esta información. Supongamos un intervalo I = [-L /2, L/2] paralelo a la dirección del acimut de la ionosfera, donde L es la longitud de coherencia en torno a la altura ionosférica (Xu et al., 2004) y el origen al plano que corresponde Doppler cero (Figura 8). La media de ΔCET en el intervalo I es determinada por ΔΩ y su tasa de cambio lineal por Δa. Dividiendo el intervalo I en segmentos K, podemos asignar ΔCET para cada segmento del intervalo. Entonces RF en el plano de Doppler cero es:

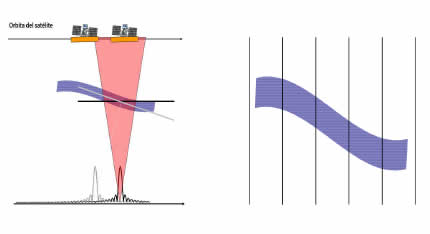
Figura 8. Diagrama esquemático para el cálculo de la media de ΔCET .
Figure 8. Schematic diagram for the calculation of average ΔTEC .
Al mismo tiempo, la tasa de cambio del CET es:

La ecuación (29) se obtiene a partir de la estimación por mínimos cuadrados. Teniendo los observables ΔΩ y Δa , y un operador GΩ,Δa , que relaciona ΔCET a los observables, podemos escribir:

Esta es una típica formulación de un problema inverso (Beaulieu and Touzi, 1993). Como la ecuación es lineal, tomando su inversa es suficiente para encontrar ΔCET . Desde (Beaulieu and Touzi, 1993), el ΔCET se puede encontrar a partir de:
![]()
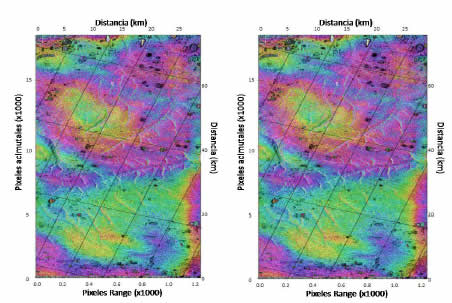
Figura 9. Imagen ALOS-PalSAR con RF (izquierda) y resultado del efecto combinado (derecha).
Figure 9. ALOS-PalSAR image with RF (left) and combined effect (right).
DISCUSIÓN Y CONCLUSIONES
Este estudio proporciona una actualización de las herramientas polarimétricas que se utilizan actualmente para la extracción óptima de la información a partir de imágenes SAR, INSAR y PALSAR polarimétricas. Son discutidos los fundamentos de la teoría polarimétrica en el contexto del radar de apertura sintética (SAR). Se considera la extracción de información usando los parámetros de ondas dispersadas recibidas y se proponen algunos esquemas de corrección ionosférica para las ondas transmitidas por el radar de apertura sintética (SAR) y para la interferometría SAR polarimétrica (PolInSAR). La variación temporal y espacial de la densidad de electrónica en la alta atmosfera afecta la propagación del pulso de radar dando lugar a distorsiones de la imagen. Se estima el contenido electrónico total (CET) mediante la aplicación de la ecuación de Appleton-Hartree debido a distorsiones en el enfoque, la polarimetría y la interferometría. Se propone un estimador combinado que produce estimaciones diferenciales del CET. Se discute además el efecto de la estructura vertical de la ionosfera desde la fase interferométrica y se describen instrucciones importantes para la investigación futura. La discusión anterior se basa en la suposición de que la altura efectiva de la ionosfera es constante con respecto a tiempo. En tal caso, las discrepancias entre el CET, ∂CET/∂x y φ son el resultado del ruido aleatorio. Los números a lo largo de contornos indican la fase interferométrica en grados para un CET constante (1 UCET), y una altura ionosférica que cambia alrededor de unos 10km. Podemos ver que en el caso de las correcciones interferométricas de fase, se necesita la información sobre la estructura vertical de la ionosfera, además de la del CET.
REFERENCIAS
1. Agrawal, A.B. and Boerner, W. M., (1989).Redevelopment of Kennaugh's target characteristic polarization state theory using the polarization transformation ratio formalism for the coherent case. IEEE Transaction, Geoscience Remote Sensing, 27(1): 2-14. [ Links ]
2. Ainsworth, T.L., Jansen, R.W., Lee, J.S. y Fiedler, R., (1999). Sub - aperture analysis of high - resolution polarimetric SAR data. En: Procedings of the IGARSS'99 Symposium, Hamburg, Germany, 41-46. [ Links ]
3. Antar, Y.M.M., Hendry, A. y McCormick, G.C., (1992). Circular polarization for remote sensing of precipitation. IEEE Transaction, Antennas Propagat., 34(6): 7-16. [ Links ]
4. Appleton, Sir Edward, (1932). Wireless studies of the ionosphere. Journal Inst. Electronic Engineering, 71: 642-650. [ Links ]
5. Azzam, R.M.A., (1977). Ellipsometry and Polarized Light. North Holland, Amsterdam, 558 p. [ Links ]
6. Barakat, R., (1981). Bilinear constraints between elements of the 4x4 Mueller - Jones transfer matrix of polarization theory. Opticus Communication, 38: 159-161. [ Links ]
7. Barakat, R., (1985). The statistical properties of partially polarized waves. Journal of the Optical Society of America, 32(3): 295-312. [ Links ]
8. Barnes, R.M., (1986). Antenna polarization calibration using in - scene reflectors. En: Proc. of 10th DARPA/Tri-Service Millimeter Wave Symposium, US Army Harry Diamond Lab., Adelphi, MD, 35-40. [ Links ]
9. Beaulieu, J.M. and Touzi, R., (2003). Segmentation of textured scenes using polarimetric SARs. En: Proc. of IGARSS 2003, Toulouse, France, 1: 446-448. [ Links ]
10. Beaulieu, J.M. y Touzi, R., (2004). Segmentation of textured scenes using polarimetric SARs. IEEE Transaction, Geoscience Remote Sensing, 42(10): 2063-2072. [ Links ]
11. Belcher, D.P., (2008). Theoretical limits on SAR imposed by the ionosphere, IET Radar Sonar Navigation, 2(6): 435-448. [ Links ]
12. Boerner, W.M., El-Arini, M.B., Chan, C. y Mastoris, P.M., (1981). Polarization dependence in electromagnetic inverse problems. IEEE Transaction, Antennas Propagation, AP-29: 262-271. [ Links ]
13. Boerner, W. M., Liu, C.L. y Zhang, (1993). Comparison of Optimization Processing for 2x2 Sinclair, 2x2 Graves, 3x3 Covariance, and 4x4 Mueller (Symmetric) Matricies in Coherent Radar Polarimetry and its Application to Target Versus Background Discrimination in Microwave Remote Sensing. En: EARSeL Advances in Remote Sensing, 55-82. [ Links ]
14. Boerner, W.M., Mott, H., Luneburg, E., Livingstone, C., Brisco, B., Brown, R. J., Paterson, J.S. with contributions by Cloude, S.R., Krogager, E., Lee, J.S., Schuler, D.L., van Zyl, J.J., Randall, D., Budkewitsch, P., and Pottier, E., (1998). Polarimetry in Radar Remote Sensing: Basic and Applied Concepts. En: Ryerson, R. A., editor. Manual of Remote Sensing: Principles and Applications of Imaging Radar, John Wiley and Sons, 3(5): 271-356. [ Links ]
15. Boerner, W.M., Walther, M. y Segal, A.C., (1993). Development of the polarimetric contrast enhancement optimization procedure and its application to sea surface scatter in POL-SAR image analysis. En: Proc. of IGARSS'93, Tokyo, Japan, 180-187. [ Links ]
16. Boerner, W.M. y Xi, A.Q., (1990). Characteristic radar target polarization state theory for the coherent monostatic and reciprocal case using the generalized polarization transformation ration formulation. En: AEU, 44(4): 273-281. [ Links ]
17. Boerner, W.M., Yan, W-L., Xi, A-Q., and Yamaguchi, Y., (1991). On the Principles of Radar Polarimetry (Invited Review): The Target Characteristic Polarization State theory of Kennaugh, Huynen's Polarization Fork Concept, and Its Extension to the Partially Polarized Case. In IEEE Proc., Special Issue on Electromagnetic Theory, vol. 79(10), 1538-1550. [ Links ]
18. Borgeaud, M., Shin, R.T. y Kong, J.A., (1987). Theoretical models for polarimetric radar clutter. Journal Electromagnetic Waves and Applications, 1(1): 73-89. [ Links ]
19. Born, M. y Wolf, E., (1959). Principles of Optics: Electromagnetic Theory of Propagation, Interference and Diffraction of Light. Pergamon Press, Elmsford, NY, 800 p. [ Links ]
20. Cameron, W.L., Youssef, N. y Leung, L.K., (1996). Simulated polarimetric signatures of primitive geometrical shapes. IEEE Trans. Geoscience Remote Sensing, 34(3): 793-803. [ Links ]
21. Campbell, J.B. y Wynne, R.H., (2011). Introduction to Remote Sensing, Fifth Edition. The Guilford Press, New York - London, 667p. [ Links ]
22. Chandrasekhar, S., (1960). Radiative Transfer. Dover, New York, 392p. [ Links ]
23. Christensen, E.L., Skou, N., Dall. J., Woelders, K.W., Jorgensen, J.H., Granholm, J. y Madsen, S.N., (1998). EMISAR absolutely calibrated polarimetric L and C - band SAR. IEEE Trans. Geoscience Remote Sensing, 6: 1852-1855. [ Links ]
24. Cloude, S.R., (1985). Radar target decomposition theorems. Electronics Letters, 21(1): 22-24. [ Links ]
25. Cloude, S.R., (1986). Group theory and polarization algebra. Optik, 75(1): 26-36. [ Links ]
26. Cloude, S.R., (1997). Wide band polarimetric radar inversion studies using the entropy-alpha decomposition. En: SPIE, 3120: 118-129. [ Links ]
27. Cloude, S.R., (1988). Uniqueness of target decomposition theorems in radar polarimetry. En: Proceedings of the NATO Advanced Research Workshop on Direct and Inverse Methods in Radar Polarimetry, W.-M. Boerner et al (eds); Kluwer Academic Publishers, Dordrecht 1992; NATO ASI Series C, 350: 267-296, 1938 p. [ Links ]
28. Cloude, S.R. y Pottier, E., (1996). A review of target decomposition theorems in radar polarimetry. IEEE Transaction, Geoscience Remote Sensing, 34(2): 498-518. [ Links ]
29. Cloude, S.R. y Pottier, E., (1997). Application of the H/A/polarimetric decomposition theorem for land classification. SPIE, 3120: 132-143. [ Links ]
30. Cloude, S.R. y Pottier, E., (1997). An entropy based classification scheme for land applications of polarimetric SARs. IEEE Transaction, Geoscience Remote Sensing, 35(2): 68-78. [ Links ]
31. Conradsen, K., Nielsen, A.A., Schou, J. y Skriver, H., (2003). A test statistic in the complex Wishart distribution and its application to change detection in polarimetric SAR data. IEEE Transaction, Geoscience Remote Sensing, 41(1): 4-19. [ Links ]
32. Corr, D.G. y Rodrigues, A.F., (2002). Alternative basis matrices for polarimetric decomposition. En: Proc. of EUSAR2002, Cologne, Germany,1: 992-998. [ Links ]
33. Curlander, J.C. y McDonough, R.N., (1991). Synthetic Aperture Radar: System and Signal Processing. John Wiley and Sons, Inc., New York, NY, 340 p. [ Links ]
34. Curlander, J.C. y McDonough, R.N., (1991). Synthetic Aperture Radar Systems and Signal Processing, Wiley & Sons, Inc., 672 p. [ Links ]
35. Davidovitz, M. y Boerner, W.M., (1986). Extension of Kennaugh's Optimal Polarization Concept to the Asymmetric Matrix Case. IEEE Transaction. Antennas Propagation, 34(4): 569-574. [ Links ]
36. Deschamps, G.A., (1951). Geometrical Representation of the Polarization of a Plane Electromagnetic Wave. En: Proceedings IRE, 39: 540-544. [ Links ]
37. Deschamps, G.A. y Mast, P.E., (1973). Poincare Sphere Representation of Partially Polarized. IEEE Transaction. Antennas Propagation, AP-21(4): 474-478. [ Links ]
38. Dubois, P.C., (1992). Approach to derivation of SIR-C science requirements. IEEE Transaction, Geoscience Remote Sensing, 30: 1145-1148. [ Links ]
39. Dubois, P.C. y Norikane, L., (1987). Data volume reduction for imaging radar polarimetry. En: Proceedings of IGARSS'87 Symposium, 691-697. [ Links ]
40. Dubois-Fernandez, P., Ruault, du Plessis O., Vaizan, B., Dupuis, X., Cantalloube, H., Coulombeix, C., Titin-Schnaider, C., Dreuillet, P., Boutry, J.M., Canny, J.P., Peyret, J., Martineau, P., Chanteclerc, M. y Bruyanti, J.P., (2002). The ONERA RAMSES SAR system. En: Proceedings IGARSS 2002, Toronto, Canada, 335 p. [ Links ]
41. Egan, W.G., (2004). Optical Remote Sensing Science and Technology, Marcel Dekker, Inc. New York, Basel, 483 p. [ Links ]
42. Eom, H.J. y Boerner, W.M., (1991). Statistical Properties of Phase Difference Between Two Orthogonally- Polarized SAR Signals. IEEE Transaction, Geoscience Remote Sensing, 29(11): 182-184. [ Links ]
43. Evans, D.L., Farr, T.G., van Zyl, J.J. y Zebker, H.A., (1988). Radar polarimetry: Analysis tools and applications. IEEE Transaction, Geoscience Remote Sensing, 26(6): 774-789. [ Links ]
44. Ferro-Famil, L., Pottier, E. y Lee, J.S., (2001). Unsupervised classification of multifrequency and fully polarimetric SAR images based on the H/A/Alpha- Wishart classifier. IEEE Transaction, Geoscience Remote Sensing. 39(11): 2332-2342. [ Links ]
45. Ferro-Famil, L., Reigber, A., Pottier, E. y Boerner, W.M., (2003). Scene characterization using sub-aperture polarimetric SAR data analysis. IEEE Transaction, Geoscience Remote Sensing, 41(10): 2264-2276. [ Links ]
46. Foo, B.Y., Chaudhuri, S.K. y Boerner, W.M., (1984). A High Frequency Inverse Scattering Model to Recover the Specular Point Curvature from Polarimetric Scattering Matrix Data. IEEE Transaction, Antennas Propagation, 32(11): 1174-1178. [ Links ]
47. Foo, B.Y., Chaudhuri, S.K. y Boerner, W.M., (1990). Polarization Correction and Extension of the Kennaugh-Cosgriff Target - Ramp Response Equation to the Bistatic Case and Applications to Electromagnetic Inverse Scattering. IEEE Transaction, Antennas Propagation, 38(7): 964-972. [ Links ]
48. Freeman A., (1991). A new system model for radar polarimeters. IEEE Transaction, Geoscience Remote Sensing, 29(4): 761-767. [ Links ]
49. Freeman, A., (1992). SAR calibration: An overview. IEEE Transaction, Geoscience Remote Sensing, 30(6):1107-1122. [ Links ]
50. Freeman, A. (1995). SIR - C/X data quality and calibration results. IEEE Transaction, Geoscience Remote Sensing, 33(4): 848-857. [ Links ]
51. Freeman, A., (2004). Calibration of linearly polarized SAR data subject to Faraday rotation. IEEE Transaction, Geoscience Remote Sensing, 42(8): 1617-1624. [ Links ]
52. Freeman, A. and Durden, S.L., (1998). A Three-Component Scattering Model for Polarimetric SAR Data. IEEE Trans. Geoscience Rem. Sens., 36(3): 963-973. [ Links ]
53. Freeman, A. y Saatchi, S., (2004). On the detection of Faraday rotation in linearly polarized L - band SAR backscatter signatures. IEEE Transaction, Geoscience Remote Sensing, 42(8): 1607-1616. [ Links ]
54. Freeman, A., Villasenor, J., Klein, J.D., Hoogeboom, P., y Groot, J., (2001). On the use of Multi-Frequency and Polarimetric Radar Backscatter Features for Classification of Agricultural Crops. International Journal of Remote Sensing, 15(9): 1799-1812. [ Links ]
55. Freeman, Tony, Pi, Xiaoqing and Zhou, Xiaoyan, (2009). Sub-Mesoscale Imaging of the Ionosphere with SMAP. CEOS Workshop, ASF, Fairbanks, Alaska, 10 p. [ Links ]
56. Iannini, Lorenzo, (2013). SAR Polarimetric Monitoring by Natural Calibrators, Politecnico di Milano, Dipartimento di Electtronica e Informazione, PhD Thesis. [ Links ]
57. Graves, M.R., Peyman, D.L., Jenkins, T.F., Bigl, S., Walsh, M.E., Hewitt, A.D., Lambert, D., Perron, N., Ramsey, C., Gamey, J., Beard, L., Doll, W.E. y Magoun, D., (2007). Evaluation of Airborne Remote Sensing Techniques for Predicting the Distribution of Energetic Compounds on Impact Areas. Engineering Research and Development Center, ERDC TR-07-13,188 p. [ Links ]
58. Kim, J.S. y Papathanassiou, K.P., (2010). Faraday rotation estimation performance analysis. En: Proceedings EUSAR2010 8th European Conference on Synthetic Aperture Radar, Aachen, Germany, June7-10, 4p. [ Links ]
59. Khorram, S., Koch, F.H., van der Wiele, C.F., Stacy A. y Nelson C., (2012). Remote Sensing. International Space University, Springer, 141p. [ Links ]
60. Klimenko, M.V., Klimenko, V.V., Ratovsky, K.G., Goncharenko, L.P., Sahay Y., MacKinnell, L.A., Lynn, K.J., Vlasov, A.A., Vesnin, A.M., Rios, V.H., Zykov, E. Yu., Habarulema, J.B. y de Abreu, A.J., (2011). Model/Data comparison of the ionospheric effects at the separate stations during geomagnetic storms on September 2005. 13avo Simposio IES (Ionosphere Effects Symposium), Alexandria, Virginia, USA, 9 p. [ Links ]
61. Lavalle, Marco, (2009). Full and Compact Polarimetric Radar Interferometry for Vegetation Remote Sensing. UNIVERSITÉ DE RENNES1, Institut d'Electronique et de Télécommunications de Rennes and UNIVERSITÁ DEGLI STUDI DI ROMA TOR VERGATA, Dipartimento di Informatica, Sistemi e Produzione. PhD Thesis. [ Links ]
62. Meyer, Franz, (2010). Performance requirements for correction of ionospheric signals in L-band SAR data. En: Proceedings EUSAR 2010 8th European Conference on Synthetic Aperture Radar, Aachen, Germany, June7-10, 5 p. [ Links ]
63. Meyer, Franz J., (2008). Member, IEEE and Jeremy B. Nicoll. Prediction, Detection, and Correction of Faraday Rotation in Full - Polarimetric L - Band SAR Data. IEEE Transaction on Geoscience and Remote Sensing, 46 (10): 3076-3086. [ Links ]
64. Meyer, F.J, Rosen, P., Freeman, A., Papathanassiou, K., Nicoll, J., Watkins, B., Eineder, M., Bricic, R., Ainsworth T., (2010). A Review of Ionospheric Effects in Low-Frequency SAR Data. IGARSS'10, Honolulu, Hawaii, USA, 29-32. [ Links ]
65. Ouchi, K., (2013). Recent Trend and Advance of Synthetic Aperture Radar with Selected Topics. Remote Sensing, 5: 716-807. [ Links ]
66. Raimadoya, M.A. y Trisasongko, B.H., (2007). Application of Polsar For Tropical Timber Plantation. En: Indonesia; ESA, POLinsar 2007 Symposium, 7p. [ Links ]
67. Reddy, A. M., (2008). Remote Sensing and Geographical Information Systems. Third Edition. BS Publications, Giriraj Lane, Sultan Bazar, Hyderabad - 500095 AP, 453 p. [ Links ]
68. Rios, V.H., Leal, S., de Haro, B., Padilla, P. y Esquivel, H., (2010). Evaluation of Inversion Methods Applied to Ionospheric RO Observation, International Beacon Satellite Symposium, Barcelona, June 7 - 11, 6 p. [ Links ]
69. Sandberg, G., (2013). Estimation of Forest Biomass and Faraday Rotation using Ultra High Frequency Synthetic Aperture Radar. Department of Earth and Space Sciences, Chalmers University of Technology, Gothenburg, Sweden, PhD Thesis for the degree of doctor of Philosophy. [ Links ]
70. Sauer, S., Ferro-Famil, L., Reigber, A. y Pottier, E., (2007). Multibaseline POL-InSAR analysis of urban scenes for 3D modeling and physical feature retrieval at L-band. Geoscience and Remote Sensing, IEEE International Symposium - IGARSS'07, 4 p. [ Links ]
71. Sokol, J., NcNairn, H. y Pultz, T.J., (2011). Case studies demonstrating hydrological applications of C-band multi-polarized and polarimetric SAR CJRS. Canadian Journal of Remote Sensing, 37(1): 1-170, 3701- 3710. [ Links ]
72. Souyris, J.C., Stacy N., Ainsworth, Lee J.S., Dubois-Fernandez, P.S., (2007). Compact Polarimetry (Cp) For Earth Observation and Planetology: Concept and Challenges A study case at P band; ESA, POLinsar, Symposium, 12 p. [ Links ]
73. Tarantola, A., (2005). Inverse Problem Theory and Methods for Model Parameter Estimation, SIAM. Library of Congress Cataloging-in-Publication Data, 317 p. [ Links ]
74. Tsynkov, S., (2013). Single Polarization SAR Imaging in the Presence of Faraday Rotation. Air Force Office of Scientifc Research (AFOSR). Workshop on Electromagnetism, Arlington, VA, 279-287. [ Links ]
75. Tsynkov, S.V., (2012). Reducing the ionospheric distortions of spaceborne SAR images by dual carrier probing. Institute for Pure and Applied Mathematics (IPAM) meeting "Challenges in Synthetic Aperture Radar", Los Angeles CA, 42-47. [ Links ]
76. Valladares, C. y Ríos, V.H., (2010). Observation of TID's Using the LISN Network. International Beacon Satellite Symposium, Barcelona, June 7 - 11, 5 p. [ Links ]
77. Xu, Z., Wu, J. y Wu, Z., (2004). A survey of ionospheric effects on space-based radar, Waves in Random Media, 14: 189-273. [ Links ]
78. Yeh, K.C. y Liu, C.H., (1972). Theory of Ionospheric Waves, Academic Press, Inc., 190 p. [ Links ]
Recibido: 2-7-2013
Aceptado: 3-1-2014

