










Servicios Personalizados
Revista

Articulo
 Inglés (pdf)
Inglés (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkRevista de la Facultad de Ciencias Agrarias. Universidad Nacional de Cuyo
versión impresa ISSN 1853-8665versión On-line ISSN 1853-8665
Rev. Fac. Cienc. Agrar., Univ. Nac. Cuyo vol.52 no.2 Mendoza dic. 2020
ORIGINAL ARTICLE
Mechanical canopy and trunk shaking for the harvesting mechanization of table olive orchards
Vibración de copa y tronco mecánica para la recolección de olivar de mesa
Rafael R. Sola-Guirado1 *, Francisco J. Castillo-Ruiz1, Gregorio L. Blanco-Roldan1, Emilio Gonzalez-Sanchez1, Sergio Castro-García1
1 Universidad de Córdoba. Campus Rabanales. Ed. Leonardo Da Vinci. Ctra. Nacional IV. km. 396. 14014. Córdoba. * <ir2sogur@uco.es
Originales: Recepción: 23/07/2018 - Aceptación: 12/10/2019
ABSTRACT
Table olive harvesting is highly dependent on manual labour and may jeopardize the crop benefit. The introduction of a mechanical harvest system requires a global evaluation of the whole process. A trunk shaker along with shaker combs and a continuous canopy shaker harvester have been tested in two orchards with different tree training and layout to determine their feasibility to mechanical harvesting in table olives. For that purpose, several parameters have been evaluated. Canopy shaker required adapted orchard layout and hedge of canopies for reaching an acceptable harvesting efficiency about 80% and trunk shaker performed a higher efficiency of more than 95% but depended highly on labour. Both systems had a high field capacity about 0.15 ha h-1 but low for the trunk shaker considering the people (0.01 ha h1 person-1). The vibration pattern that applied on branches was totally different although the quantitative tree damages were no significative different. There were no significant differences in fruit bruising between both systems, but there were between the different sampling points, mainly in the detachment. The fruit bruising index of the remaining fruit on canopy suggests that it is possible to perform a second harvest. Both mechanical systems are suitable for table olive harvesting whilst improving the efficiency of manual systems with bearable damages, but each one has pros and cons that must be considered bearing in mind that require an adaptation of the orchard where there are applied.
Keywords: Canopy shaker; Trunk shaker; Fruit bruising; Machinery; Mechanical harvesting
RESUMEN
La recolección del olivar de mesa tiene una alta dependencia de la mano de obra que perjudica al beneficio del cultivo. La introducción de sistemas de recolección mecánicos requiere una evaluación global del proceso íntegro. Un vibrador de troncos con apoyo de sacudidores de ramas manuales y una cosechadora con sacudidor de copa han sido probados en dos plantaciones con diferentes morfologías para determinar la factibilidad de la recolección mecanizada de olivar de mesa. Con este propósito, se han evaluado diferentes parámetros. El sacudidor de copa requirió un marco adaptado con copas con forma de seto para alcanzar una eficiencia de recolección aceptable del 80% y el vibrador de troncos obtuvo una eficiencia mayor al 95% aunque dependió altamente de mano de obra. Ambos sistemas tuvieron una capacidad de trabajo alta de 0,15 ha h-1 aunque teniendo en cuenta la capacidad por persona fue más baja en el vibrador (0,01 ha h-1 persona-1). El patrón de vibración aplicado en las ramas fue muy distinto aunque los daños no fueron cuantitativamente diferentes de manera significativa. No hubo diferencias significativas en el molestado de frutos para ambos sistemas de recolección pero sí las hubo entre los diferentes puntos de muestreo de las etapas de la recolección, principalmente en el derribo. El índice de molestado de los frutos que quedaron en la copa sugiere que es posible realizar una segunda pasada de recolección. Los dos sistemas empleados son aptos para la recolección de aceituna de mesa mejorando la eficiencia de los sistemas manuales con daños asumibles, pero cada uno tiene unas ventajas y desventajas que deben considerase teniendo en cuenta que se requiere de una adaptación de la plantación donde sean aplicados.
Palabras clave: Sacudidor de copa; Vibrador de tronco; Molestado; Maquinaria; Cosecha mecánica
INTRODUCTION
Table olive is a traditional crop with an outstanding importance. Spain produces 21% of world production exporting the 30% of the world production (IOOC, 2015). Table olive prices often fluctuates (CAPDR, 2016) with similar growing cost. The high cost of operations, the low availability of labour, and the low prices in the market threaten the crop profitability.
Traditional trees are trained with several trunks and very low canopies to ease manual harvesting (12). This method is chosen because it achieves high quality harvested fruit without causing tree damages but with low efficiency rates. The introduction of mechanization may be an adequate way to modernize the sector, but mechanical harvesting involves several problems, such as fruit susceptibility to bruising.
The recent procedure developed for Spanish-style green table olives to stop the fruit bruising (Jimenez-Jimenez et al., 2015) opens new possibilities for mechanical harvesting. This procedure consists in submerging the detached fruit in liquid right after harvesting. However, it is necessary to deepen in the study of the mechanical systems, like performed in other tasks that use machinery.
On one hand, trunk shakers are machines formed by a clamp that grabs the tree trunk and perform a vibration through an unbalanced mass. This technology has been evolving for more than half a century from the design of basic mechanisms (Herbst, 1964) to automated systems (9). The influence of several parameters on olive harvesting has been studied widely (Leone et al., 2015; Castro-Garcia et al. 2015; Farinelli et al. 2012). Nowadays, it is the most widespread mechanical method, but have several limiting factors: tree architecture non-adapted; high power requirements; low removal efficiencies due to high fruit detachment force (FDF) that require additional manual beating (Zipori et al., 2014) or abscission agents (Ninot et al., 2012); trunk debarking due to physiological status of the plant during harvesting process; limitation in fruit interception due to the irregularities in the trunks of the trees.
On the other hand, lateral canopy shakers are machines formed by several rods that beat the branches. Although this technology was tested long time ago, (33), the development of the machines has been adapted to the harvesting of citrus fruits (25). However, it could be an interesting and alternative mechanical system with continuous integral harvesting that, even though it has already been tested in California table olive orchards (13), it needs to be evaluated in Spanish orchards structures. With promising results, the system could be spread in the Mediterranean basin orchards.
Nowadays, the morphology of table olive orchard is very heterogeneous, although traditional structures trained for manual harvesting are the norm. One canopy shaker harvester and one trunk shaker with shaker combs beating were evaluated in different commercial orchards non-adapted for mechanical harvesting, either with trunk or canopy shakers. The aim of the present research was to determine the feasibility of both mass harvesting systems to propose and improve orchard and machine adaptions, contributing to the sustainability of the farms.
MATERIALS AND METHODS
Harvesting tests were conducted in two irrigated high-density olive orchards of the 'Manzanilla' cultivar located in Cordoba, Spain (N 37°50'18.102", W 5°0' 47.569"; N 37°49'58.994", W 5°1' 32.416") with the most common features of commercial orchards. Fruit properties such maturity index, FDF or weight, tree architecture and orchard layout were measured to determine their influence on harvest. Orchards showed different tree training and orchard layout (table 1, page 127).
Table 1. Features of the orchards where the tests were conducted.
Tabla 1. Propiedades de las plantaciones donde se realizaron los ensayos.

Orchard A
Irregular shaped plot with different tree rows length and acute angle between rows. Originally, trees were trained with two trunks but one trunk was cut to enhance trunk shaker performance five years before these test, so with this adaption trees had a vase-shaped asymmetric canopies and tree structure and orchard layout were poorly adapted to mechanical harvesting.
Orchard B
Regular shaped plot with regular long rows and right angle between rows and headland alley. Trees were two trunks trained vase-shaped having from 2 to 3 scaffolds per trunk. Tree structure was also inadequate for mechanical harvesting, but orchard layout was adequate for machinery maneuverability.
Two harvesting systems were evaluated (photo).
Canopy shaker (CS)
Tractor drawn canopy shaker with a catch frame and several shaking heads that could approach independently to the canopy frame (Universtiy of Cordoba- Moresil, patent number ES2560353). The integral harvester performed fruit detachment, catching and loading to a big bag. The system required 3 operators: one of them to drive the tractor, a second to command the canopy shaker approach to trees (31) and a third to manage the big-bag. Applied vibration were characterized by 5.1 s-1 frequency with rod amplitude stroke of 0.14 m and a ground speed of 1 km h-1.
Trunk shaker and shaker combs (TS+SC)
Rear tractor hitched trunk shaker (Arcusin, 81 Autopick GT) driven by one operator with 4 hand held shaker combs (Stihl, SP 92 TC-E). Fruit was detached by the 5 machines on plastic nets located underneath tree canopy, being subsequently 83 managed and loaded to small boxes by another 5 people.

Photo. Harvesting systems tested in the table olive orchards: Tractor drawn canopy shaker (left) and trunk shaker with hand held shaker combs (right).
Foto. Sistemas de recolección utilizados en las plantaciones de olivar de mesa. Sacudidor de copa arrastrado por tractor (izquierda) y vibrador de tronco con vibradores de ramas (derecha).
This harvesting system required 10 workers to avoid trunk shaker stoppages. Applied vibration was characterized 5 s shaking time, 28 s-1 frequency.
The canopy shaker was tested on orchard A and B, but the trunk shaker was tested only in orchard B because preliminary test showed similar results on harvesting efficiency, performance and damages due to the similarities in the trunks trained. On the one hand, canopy shaker tests were conducted performing 12 replications in each orchard, considering each replication the half of a tree row, and then another 12 replications on the other half of the tree row. After each replication, fruit was unloaded. On the other hand, trunk shaker test was conducted performing 24 replications but, for this harvesting system, each tree was considered a replication, because fruit was gathered and unloaded for each tree. Once fruit was detached and loaded in boxes for TS+SC, or in big bag for CS, fruit was carried to cleaning facilities, to a tank located within the plot. Then, fruit was cleaned and subsequently, it was placed on NaOH solution at 0.3 % (v/v) in cold water to 10-14°C. For CS, fruit was cleaned twice, one on the harvester by blowing cleaner, and afterwards on in-field cleaning facilities.
During in-field tests some parameters were measured and analyzed for both harvesting systems.
Harvesting systems efficiency
Detachment efficiency
Ratio between detached fruit by the harvesting systems and tree production. Detached fruit by each system was weighted and fruit remained on tree canopy was exhausted using hand held shaker combs and long poles.
Detachment efficiency (harvestable)
For the canopy shaker, remained fruit on tree was weighted separately for harvestable canopy volume and unreachable canopy volume (branches that were located within 1.5 m depth from outer canopy surface (length of the rods) considered as a hedge due to olive orchard layout with canopies in contact along the row).
Catching efficiency and harvesting efficiency
Relation between caught fruit on canopy shaker and detached fruit (catching efficiency) and tree production (harvesting efficiency). For the trunk shaker the whole detached fruit is collected by the nets, so the relation is 1.
Harvesting systems performance
Effective field capacity and field efficiency
Ratio between harvested area and time required (effective field capacity), and percentage of time the machine is shaking and is operating (field efficiency). A remote tracking system (MTX65+G+B V7, Matrix electronica) was installed on both harvesting systems and collected data were sent via GSM/GPRS to a host control platform to determine harvester position in each time element and the time in which it was harvesting.
Harvesting vibration pattern
Acceleration values were measured in fruit bearing branches during canopy shaking or trunk shaking in the three main axes using a wireless portable accelerometer (Gulf Coast Data Concepts LLC, X200-4) properly attached to branches. Afterwards, collected data were analyzed using NVGate v8.0 software.
Harvesting system damages
Debris production
Eights of the broken branches and stems after the harvesting process.
Fruit bruising
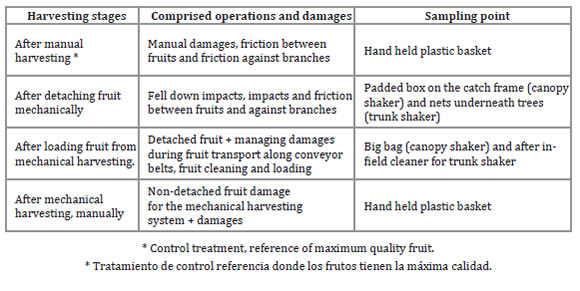
Percentage of total bruised area respect to the total area of fruit (counted in pixel), analyzed using the bruise index by image analysis following the methodology exposed by Jimenez-Jimenez et al. (2013b). Fruit samples were placed on a white sheet as background, being illuminated only with diffuse light and photographs were taken using a digital camera (Nikon D80 with 18-135 mm lens, 10.2 MP, 3.872 × 2.592) placed in a zenith position on a frame. Afterwards, RAW images were processed and subsequently, segmentation process was conducted using ImageJ software to calculate fruit area and bruised area. Fruit samples were taken from different stages within harvesting process (table 2).
Table 2. Sampling points for different harvesting stages.
Tabla 2. Puntos de muestreo para las diferentes etapas del proceso de recolección.
Al the results were analyzed statistically with SPSS software. T-tests were used to compare independent variables like machines performance and analysis of variance (ANOVA) enabled the comparison of other groups of variables like whose that were involved in bruising stages. For the analysis of the fruit bruising between different fruit sizes, it was used Friedman's test because data were non parametric.
RESULTS AND DISCUSSION
Harvesting systems efficiency
The detachment and harvest efficiencies of trunk shaker along shaker combs and canopy shaker are shown in figure 1 (page 130).
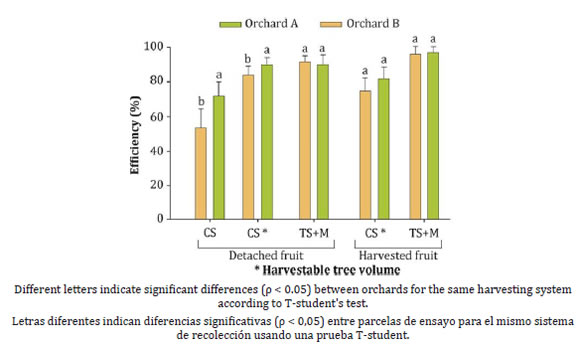
Figure 1. Detachment and harvesting efficiency for the canopy shaker (CS) and for trunk shaker with hand held shaker combs (TS+SC) in tested orchards A and B.
Figura 1. Eficiencia de derribo y recolección para el sacudidor de copa (CS) y para el vibrador de tronco con vibradores de ramas (TS+SC) en las plantaciones de ensayos A y B.
Canopy shaker harvester showed adequate detachment efficiencies within harvestable canopy volume), although in orchard B, detachment efficiency was under 80%.
Nonetheless, if the whole tree production was considered, detachment efficiency fell down to unacceptable values (under 65% of the production). Catching efficiency was 82 and 84 % in orchard A and B, respectively, and did not differ between orchards, although it could be improved through harvester design, avoiding fruit thrown out of the catch frame. Detachment and then, harvesting efficiencies were influenced by tree structure and orchard layout, finding significant differences between orchards for canopy shaker (ρ < 0.05, Student's t-test) for both variables. Trunk shaker detachment efficiency was higher in all cases for both orchards features, and so harvest efficiency because it has not any catch frame. The canopy shaker offer the possibility of an integral harvesting because the fruit detachment is located in the contact zone allowing a catch frame collect fruit harvested, even though this system manifests deficiencies due to the lack of adaptations that exist.
Results shown higher efficiency for trunk shaker than canopy shaker. As FDF and fruit weight could be an adequate parameter to predict harvesting efficiency using trunk shakers (11), different behaviour of harvesting systems between these orchards may have a higher influence. Harvested orchard showed enough adaptation to trunk shaker harvesting, while canopy shaker required different tree training and orchard layout to reach similar harvesting efficiency.
Moreover, trunk shaker had more favourable conditions, due to it worked along with hand held shaker combs.
It would be advisable to optimize the vibration applied to the tree so as not to depend on manual aids. It is possible and desirable to adapt tree structure to the harvester by performing the pruning aiming to enlarge the harvesting efficiency and to reduce debris production (7). However, even trunk shakers improve the harvesting efficiency if trees are previously adapted by a proper tree training (37).
For the canopy shaker, differences for detachment and harvesting efficiencies between orchards might be due to the tree structures. The heterogeneity of tree structure in orchard A, difficulted the harvest by CS. Previous studies confirm that canopy shakers are more efficient when working on a compact canopy rather than on a thinned canopy and flat canopy surface (36), similarly to mechanical pruning (13). Canopy shakers are eligible to perform in multi-trunk traditional olive trees (30) or in big sized canopies (10). In this case of study, tree height was adequate for trunk shaker with manual aids making possible harvesting with long poles or hand-held devices and also for the canopy shaker, but nonetheless, trees could be higher for canopy shakers because the machine height could be enlarged. This height is needed to use the whole shaker heads completely making possible increase tree production and machine efficiency. Crotch height was also enough for trunk grabbing, although leant trunks (Orchard A and B) or two-trunk trees (Orchard B) hinder grabbing operation.
In order to introduce a new mechanical harvesting system in table olive, as the canopy shaker, it is required to perform an adaptation process of the crop to the harvester (39). It seems that the most adequate tree structure and orchard layout for canopy shaker harvesting should be a wide hedge whose height must be limited in order to keep high light incidence on the whole canopy at the same time. In a similar way, several researches are developing hedgerow of table olives for harvesting with straddle harvesters (23). Fruit must be located within harvestable canopy volume for shaker rods, within the rod length from the outer canopy surface. For this reason, hedge width should be also limited in order reduce as much as possible unreachable canopy volume, keeping all structural wood within the reachable. Hedge width also explained differences in detachment efficiency between orchards because in orchard B, unreachable canopy volume was larger than in orchard A. Production within unreachable canopy volume, should be as low as possible, although in young intensive olive orchards, fruit located in inner canopy volume is under 10% (5).
Harvesting systems performance
Field capacity measurements provided similar values for canopy and trunk shaker in a same orchard B (0.17 ± 0.04 and 0.12 ± 0.03 ha h-1, respectively) although they are strongly different taking account the required workers in terms of ha h-1 worker-1 (0.06 and 0.01, respectively).
However, high differences were found between orchards A and B for canopy shaker (0.08 ± 0.02 and 0.17 ± 0.04 ha h-1, respectively). Tractor hitched trunk shaker along with shaker combs showed an intermediate field capacity. Field efficiency was quite similar for trunk and canopy shaker (0.52 and 0.59, respectively), although significant differences (ρ < 0.05, t-Student) were found between orchards A and B (0.47 and 0.69, respectively) for canopy shaker variables.
Differences in field efficiency and field capacity are mainly due to orchard layout, specifically, field shape and angle between rows and headland. Particularly, taking into account the harvester maneuverability, orchard A has a worse layout than orchard B, with acute angles between headland and rows. Therefore, the canopy shaker needs to spend more times in turnings, which result in much lower field efficiency, but even lower field capacity. Canopy shaker size of could be reduced to enhance its manoeuvrability with self-propelled systems. On the other hand, orchard B was designed with a regular shape and right angle between rows and headland, that improve canopy shaker field efficiency and field capacity. Narrow tree spacing, and irregular row length also hinder canopy shaker harvesting in orchard A. Trunk shaker could provide more interesting results in orchards with poor adaption to mechanical harvesting (3), while canopy shaker could be more interesting in regular shaped orchards with long rows and wide headlands.
Tractor hitched trunk shaker along with shaker combs showed an inter- mediate field capacity, similar to other researches (5) that report values between 0.12 and 0.20 ha h-1.
However, tree structure was roughly adapted to trunk shaker harvesting, considering that some aspects could be improves as leant trunks. Nonetheless, if harvesting performance was analyzed by field capacity per worker, this harvesting system provided the lowest value, which implied the lower harvesting system competitiveness. From an economic point of view, this factor is correlated and must be assess, together with other economic aspects (2) that could be the key of its profitability taking into account than manual labours may increase harvesting cost. Moreover, it necessary to highlight that canopy shaker may extend their work hours in a day, although in this study it has been only consider 7.5 h day-1.
Harvesting systems vibration pattern
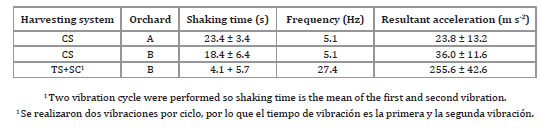
The setting of the vibration parameters of both harvesting systems made possible an effective harvesting for olive) (table 3).
Table 3. Vibration analysis in tested orchards for the canopy shaker (CS) and the trunk shaker along with shaker combs (TS+SC). Values are mean ± standard deviation.
Tabla 3. Análisis de la vibración en las plantaciones ensayadas para el sacudidor de copa (CS) y el vibrador de troncos con apoyo de sacudidores de ramas (TS+SC). Los valores muestran media ± desviación estandar.
Trunk shakers have been mainly adapted to table olive harvesting condition by the regulation of the frequency vibration, shaking time and also with softer padding materials, but still required a complementary manual rod beating. Canopy shaker regulation entails a greater number of factors that affect the harvesting as rod amplitude and motion, frequency vibration, rod material, rod density or inclination and the ground speed (30).
Canopy shaker effectiveness relied on high acceleration peaks of short duration which reach up to 409.7 and 509.1 ms-2 in orchard A and B, respectively, that are reduced in the root mean square calculation. These high acceleration impacts were similar to manual harvesting by long poles (29), although canopy shaker also generated medium and low impacts due to higher frequency. Acceleration values were higher for orchard B than for orchard A while detachment efficiency was lower in orchard B respect to orchard A. These facts highlight the importance of hedge/ canopy size for canopy shakers, which are not able to transmit vibration to inner branches (26). Therefore, tree training (40) and orchard layout were key factors to enhance harvesting efficiency both for harvesting systems.
Trunk shaker applied a vibration pattern that could cause trunk bark damage, in particular in table olives trees when are still in vegetative growth. The verticality of tree structure is capital to achieve vibration transmission rate. Canopy shaker requires neither trunk nor branch grabbing, because vibration is applied directly on bearing branches through impacts when rods are inside tree canopy. Tree spacing with isolated trees is more favorable for trunk shaking in order to avoid vibration damping, although this fact was harmful for canopy shaker performance which preferred hedge training of the whole row. However, the behaviour of trees is also different according to the tree top, middle of bottom zone (14, 31) so it is very important to size adequately tree and shaker for an effective interaction between both.
The shaking time for canopy shaker was higher than for trunk shaker (table 3, page 132). For canopy shaker, which is a continuous system, increasing the acceleration more and more until the maximum values when the rod is directly hitting the branch and then decreasing until the rod contact with branches ends (32). However, the trunk shaker achieves the maximum values of acceleration quickly and so, the time that need to be vibrating is lower. The shaking time conditioned the detachment system efficiency for trunk shakers (1) and for canopy shakers (27), but must be optimized to not limit the field capacity.
Harvesting system quality
Debris production was 0.5 kg tree-1, ranging branches from 2 to 5 cm diameter in the broken point without Significant differences founded between trunk and canopy shaker. Debris production was in accordance with other researches (29). Olive cultivar also has influence on damages, mainly due to differences in growing pattern and lateral shooting (15). Pruning could also influence debris production and detachment efficiency, due to different pruning systems influence on tree growth (18) and on crown porosity/ density (6).
The choice of the harvesting system conditioned fruit bruising within different stages of the process (figure 2, page 134).

Figure 2. Bruise index by image analysis in different harvesting stages and for different harvesting systems.
Figura 2. Índice de molestado por análisis de imágenes en diferentes etapas de la recolección para distintos sistemas de recolección.
The fruit-to-fruit and fruit-to- plant contacts during vibration process produced bruising that explain the high bruise index in manually exhausted fruit (table 2, page 129).
Nonetheless, manually exhausted fruit provided better quality than other harvesting stages with significant differences (ρ < 0.05, Duncan-test) only for trunk shaker along with shaker combs. The most non-detached fruit were within unreachable canopy volume by rods so were not impacted (for canopy shaker) and in branches where the vibration did not reach high acceleration values (for trunk shaker).
The most critical stage was detaching process for both mechanical harvesting systems. Fruit bruising is influenced by impact energy and by cultivar (19) depending impact energy on fruit acceleration and fresh weight. Considering only vibration intensity in relation to fruit bruising, canopy shaker and trunk shaker provided similar acceleration besides no significant differences (ρ < 0.05, Student's t-test) for fruit bruising. That means that not only must be considered resultant acceleration values, but also peak to peak acceleration values. This fact, highlights the importance of performing the highest vibration energy causing the lowest fruit bruising. Another factor that has a remarkable influence on fruit bruising is tree training and pruning, which could increase fruit-to-plant impacts during detachment and falling (34).
The bruising caused in detaching stage conditioned the next stage increasing the damages (figure 2, page 134) due to the catching, management and loading of fruit. For trunk shaker, no significant differences between both stages were found, but for canopy shaker bruise index provided significant differences (ρ < 0.05, Duncan's test) between detached and loaded fruit. This highlights the importance of the design of the catch frame systems, conveyor belts and cleaning system to minimize the fruit damage caused during the management process in table olive similar to other fresh fruit (35, 38).
Nonetheless, not only fruit bruising is due to impacts, but also to scratches with any other element as other fruit or plant parts (20).
Regarding fruit size and fresh weight, it did not influence on fruit bruising in all harvesting stages except for canopy shaker in detached fruit where fruit area was significantly (ρ < 0.01; r = 0.497) correlated with bruise index (figure 3).

Figure 3. Bruise index by image analysis in different harvesting stages depending on fruit area obtained by image analysis (IMD).
Figura 3. Índice de molestado por análisis de imágenes en diferentes etapas de la recolección en función del tamaño del fruto obtenido con análisis de imágenes (IMD).
Thus, fruit size or weight played a more important role during detachment process (fruit-to-fruit, fruit-to-plant and fruit-to-catching frame impacts) where inertial forces are prevalent than during the catching and loading.
Furthermore, trunk shaking power and fruit fresh weight are positively correlated with fruit bruising (8), which lead to think that the higher acceleration values applied in tree to increase harvesting efficiency, the higher fruit bruise index. Therefore, postharvest treatment is a key factor to keep acceptable fruit quality for mechanically harvested table olives (28).
CONCLUSIONS
Trunk shakers suppose a great advance compared to manual harvesting in table olive, perform a high detachment efficiency, but require a complementary shaking method, such as shaker combs. Trunk shakers have a good field efficiency, but entail a non-continuous and a non-integral method that involve extra labour for managing the detached fruit. This extra labour cost is a drawback, as it may increase the harvesting cost and may reduce the crop competitiveness respect to other countries with lower labour costs. This method forces the vibration to travel along the tree structure, and requires well trained trees to reach high efficiencies with high values of resultant acceleration, and frequency on branches. Olive bruising takes place mainly during detachment and management process, and is significantly lower than those remained in harvested trees.
Canopy shakers allow an integral harvesting, but as it is an equipment under commercial development, orchards are not well adapted to them yet. The low detachment efficiency is not acceptable, so it need an adaptation of trees and to the machine features. Canopy shaker provide a higher field efficiency for large orchards, although may have problems in irregular orchard layout or with short row lengths because the maneuverability of this type of machine which has a larger dimension than trunk shakers. These massive systems may palliate the threatening of the table olive sector survival in developed countries by reducing the labour requirements, whilst increasing the working hours to cover almost the whole day with several shifts. The application of the vibration directly on bearing branches allows to perform lower acceleration values but with impacts, however it is conditioned by the canopy structure and the contact with the rods, which means higher dependence on tree training than on vibration parameters.
The fruit management process is important to keep fruit quality as high as possible so the design of catching and cleaning system, especially in harvesters such as the canopy shaker. Manually exhausted fruit have a lower bruise than other stages which open a new alternative to perform a second harvesting pass with other manual or mechanical system to enhance the detachment efficiency. Fruit susceptibility to bruising only depends on fruit size for detachment process but at the same time, fruit size conditioned the detachment efficiency so it can be considered as factor to evaluate.
All factors suggest that both systems, trunk shaker with complementary shaking method and canopy shaker, are suitable for table olive harvesting integrated with the protocol of transport/store in liquid, although each method would need a different tree training.
1. Blanco-Roldán, G. L.; Gil-Ribes, J. A.; Kouraba, K.; Castro-García, S. 2009. Effects of trunk shaker duration and repetitions on removal efficiency for the harvesting of oil olives. Applied Engineering in Agriculture. 25(3): 329-334. [ Links ]
2. Bernardi, B.; Benalia, S.; Fazari, A.; Zimbalatti, G.; Stillitano, T.; De Luca, A. I. 2016. Mechanical harvesting in traditional olive orchards: Oli-picker case study. Agronomy Research. 14(3): 683-688. [ Links ]
3. Bernardi, B.; Falcone, G.; Stillitano, T.; Benalia, S.; Strano, A.; Bacenetti, J.; De Luca, A. I. 2018. Harvesting system sustainability in Mediterranean olive cultivation. Science of The Total Environment. 625: 1446-1458. [ Links ]
4. CAPDR (Consejería de Agricultura, Pesca y Desarrollo Rural). 2016. Final report of table olive, season 2016/17=Informe Final. Aceituna de verdeo, campaña 2016/17. http://www.juntadeandalucia.es/agriculturaypesca/observatorio/servlet/ FrontController?action=Subsector&table=3940&ec=subsector&subsector=946728 [Accessed March 02, 2017] (in Spanish). [ Links ]
5. Castillo-Ruiz, F. J.; Jiménez-Jiménez, F.; Blanco-Roldán, G. L.; Sola-Guirado, R. R.; Agüera-Vega, J.; Castro-Garcia, S. 2015. Analysis of fruit and oil quantity and quality distribution in high- density olive trees in order to improve the mechanical harvesting process. Spanish Journal of Agricultural Research. 13(2): 0209. [ Links ]
6. Castillo-Ruiz, F. J.; Castro-Garcia, S.; Blanco-Roldan, G. L.; Sola-Guirado, R. R.; Gil-Ribes, J. A. 2016. Olive crown porosity measurement based on radiation transmittance: an assessment of pruning effect. Sensors. 16(5): 723. [ Links ]
7. Castillo-Ruiz, F. J.; Sola-Guirado, R. R.; Castro-Garcia, S.; Gonzalez-Sanchez, E. J.; Colmenero-Martinez, J. T.; Blanco-Roldán, G. L. 2017. Pruning systems to adapt traditional olive orchards to new integral harvesters. Scientia Horticulturae. 220: 122-129. [ Links ]
8. Castro-Garcia, S.; Castillo-Ruiz, F.J.; Jimenez-Jimenez, F.; Gil-Ribes, J. A.; Blanco-Roldan, G. L. 2015. Suitability of Spanish 'Manzanilla' table olive orchards for trunk shaker harvesting. Biosystems Engineering. 129: 388-395. [ Links ]
9. Colmenero-Martinez, J. T.; Blanco-Roldán, G. L.; Bayano-Tejero, S.; Castillo-Ruiz, F. J.; Sola-Guirado, R. R.; Gil-Ribes, J. A. 2018. An automatic trunk-detection system for intensive olive harvesting with trunk shaker. Biosystems engineering. 172: 92-101. [ Links ]
10. Famiani, F.; Farinelli, D.; Rollo, S.; Camposeo, S.; Di Vaio, C.; Inglese, P. 2014. Evaluation of different mechanical fruit harvesting systems and oil quality in very large size olive trees. Spanish Journal of Agricultural Research. 12(4): 960-972. [ Links ]
11. Farinelli, D.; Tombesi, S.; Famiani, F.; Tombesi, A. 2012. The fruit detachment force/fruit weight ratio can be used to predict the harvesting yield and the efficiency of trunk shakers on mechanical olive harvesting. Acta Horticulturae. 965: 61-64. [ Links ]
12. Ferguson, L. 2006. Trends in olive harvesting. Grasas y Aceites. 57(1): 9-15. [ Links ]
13. Ferguson, L.; Castro-Garcia, S. 2014. Transformation of an ancient crop: preparing California 'Manzanillo' table olives for mechanical harvesting. Horttechnology. 24(3): 270e273. [ Links ]
14. Gupta, S. K.; Ehsani, R.; Kim, N. H. 2015. Optimization of a citrus canopy shaker harvesting system: properties and modeling of tree limbs. Transactions of the ASABE. 58(4): 971-985. [ Links ]
15. Hammami, S. B.; de la Rosa, R.; Sghaier-Hammami, B.; León, L.; Rapoport, H. F. 2012. Reliable and relevant qualitative descriptors for evaluating complex architectural traits in olive progenies. Scientia horticulturae. 143: 157-166. [ Links ]
16. Herbst, B. T. 1964. Tree shaker. U. S. Patent No. 3,121,304. [ Links ]
17. IOOC. International Olive Oil Council. 2015. Available in: http://www.internationaloliveoil. org/estaticos/view/131-world-olive-oil-figures [Accessed November 23, 2017]. [ Links ]
18. Jiménez-Brenes, F. M.; López-Granados, F.; Castro, A. I.; Torres-Sánchez, J.; Serrano, N.; Peña, J. M. 2017. Quantifying pruning impacts on olive tree architecture and annual canopy growth by using UAV-based 3D modelling. Plant methods. 13(1): 55. [ Links ]
19. Jiménez-Jiménez, F.; Castro-García, S.; Blanco-Roldán, G. L.; Ferguson, L.; Rosa, U. A.; Gil-Ribes, J. A. 2013a. Table olive cultivar susceptibility to impact bruising. Postharvest biology and technology. 86: 100-106. [ Links ]
20. Jiménez-Jiménez, F.; Castro-Garcia, S.; Blanco-Roldán, G. L.; González-Sánchez, E. J.; Gil-Ribes, J. A. 2013b. Isolation of table olive damage causes and bruise time evolution during fruit detachment with trunk shaker. Spanish Journal of Agricultural Research. 11(1): 65-71. [ Links ]
21. Jimenez-Jimenez, F.; Blanco-Roldan, G. L.; Castillo-Ruiz, F. J.; Castro-Garcia, S.; Sola-Guirado, R. R.; Gil-Ribes, J. A. 2015. Table olives mechanical harvesting with trunk shakers: Orchard adaption and machine improvements. Chemical Engineering Transactions. 44: 271-276. [ Links ]
22. Leone, A.; Romaniello, R.; Tamborrino, A.; Catalano, P.; Peri, G. 2015. Identification of vibration frequency, acceleration, and duration for efficient olive harvesting using a trunk shaker. Transactions of the ASABE. 58(1): 19-26 [ Links ]
23. Morales-Sillero, A.; Rallo, P.; Jiménez, M. R.; Casanova, L.; Suárez, M. P. 2014. Suitability of two table olive cultivars ('Manzanilla de Sevilla' and 'Manzanilla Cacereña') for mechanical harvesting in superhigh-density hedgerows. HortScience. 49(8): 1028-1033. [ Links ]
24. Ninot, A.; Romero, A.; Tous, J.; Batlle, I. 2012. Effect of loosening agent sprays on the efficiency of the mechanical harvesting of ‘Arbequina’Olives. HortScience. 47(10): 1419-1423.
25. Sanders, K. F. 2005. Orange harvesting systems review. Biosystems Engineering. 90(2): 115-125. [ Links ]
26. Savary, S. K.; Ehsani, R.; Salyani, M.; Hebel, M. A.; Bora, G. C. 2011. Study of force distribution in the citrus tree canopy during harvest using a continuous canopy shaker. Computers Electronics in Agriculture. 76(1): 51-58. [ Links ]
27. Shamshiri, R.; Ehsani, R.; Maja J. M.; Roka, F. M. 2013. Determining machine efficiency parameters for a citrus canopy shaker using yield monitor data. Applied Engineering in Agriculture. 29(1): 33-41. [ Links ]
28. Segovia-Bravo, K. A.; García-García, P.; López-López, A.; Garrido-Fernández, A. 2011. Effect of bruising on respiration, superficial color, and phenolic changes in fresh Manzanilla olives (Olea europaea pomiformis): development of treatments to mitigate browning. Journal of agricultural and food chemistry. 59(10): 5456-5464. [ Links ]
29. Sola-Guirado, R. R.; Castro-García, S.; Blanco-Roldán, G. L.; Jiménez-Jiménez, F.; Castillo-Ruiz, F. J.; Gil-Ribes, J. A. 2014. Traditional olive tree response to oil olive harvesting technologies. Biosystems Engineering. 118: 186-193. [ Links ]
30. Sola-Guirado, R. R.; Jimenez-Jimenez, F.; Blanco-Roldan, G. L.; Castro-Garcia, S.; Castillo-Ruiz, F. J.; Gil-Ribes, J. A. 2016. Vibration parameters assessment to develop a continuous lateral canopy shaker for mechanical harvesting of traditional olive trees. Spanish Journal of Agricultural Research. 14(2): 0204. [ Links ]
31. Sola-Guirado, R. R.; Ceular-Ortiz, D.; Gil-Ribes, J. A. 2017. Automated system for real time tree canopy contact with canopy shakers. Computers and Electronics in Agriculture. 143: 139-148. [ Links ]
32. Sola-Guirado, R. R.; Aragon-Rodriguez, F.; Castro-Garcia, S.; Gil-Ribes, J. 2019. The vibration behaviour of hedgerow olive trees in response to mechanical harvesting with straddle harvester. Biosystems Engineering. 184: 81-89. [ Links ]
33. Sumner, H. R.; Whitney, J. D.; Hedden, S. L. 1975. Foliage Shaker for Citrus Harvesting Part II: Harvesting Trials. Transactions of the ASAE. 18(1): 70-73. [ Links ]
34. Takeda, F.; Krewer, G.; Andrews, E. L.; Mullinix, B.; Peterson, D. L. 2008. Assessment of the V45 blueberry harvester on rabbiteye blueberry and southern highbush blueberry pruned to V-shaped canopy. Hortechnology. 18(1): 130-138. [ Links ]
35. Takeda, F.; Yang, W. Q.; Li, C.; Freivalds, A.; Sung, K.; Xu, R.; Sargent, S. 2017. Applying new technologies to transform blueberry harvesting. Agronomy. 7(2): 33. [ Links ]
36. Tombesi, A. 2013. Advances in harvesting and pruning of olive trees. La Rivista di Scienza dell’Alimentazione. 42: 97-103.
37. Tombesi, S.; Poni, S.; Palliotti, A.; Farinelli, D. 2017. Mechanical vibration transmission and harvesting effectiveness is affected by the presence of branch suckers in olive trees. Biosystems Engineering. 158: 1-9. [ Links ]
38. Torregrosa, A.; Chaparro, O.; Martín, B.; Ortiz, C.; Bernad, J. J.; Ortí, E.; Pérez, M. 2013. Design, construction and testing of an apricot tractor-trailed harvester. Spanish Journal of Agricultural Research. 6(3): 333-340. [ Links ]
39. Tous, J.; Romero, A.; Hermoso, J. F. 2010. New trends in olive orchard design for continuous mechanical harvesting. Advances in Horticultural Science. 43-52. [ Links ]
40. Wang, D.; Chen, D.; Wang, S.; Chen, Z.; Zhang, F. 2017. Analysis on vibratory harvesting mechanism for trained fruit tree based on finite element method. Transactions of the Chinese Society of Agricultural Engineering. 33(1): 56-62. [ Links ]
41. Zipori, I.; Dag, A.; Tugendhaft, Y.; Birger, R. 2014. Mechanical Harvesting of table olives: harvest efficiency and fruit quality. HortScience. 49(1): 55-58. [ Links ]
ACKNOWLEDGEMENTS
Authors highly thank for the work performed by the colleagues of Department of Rural Engineering during field test and machines adaptations.
This work was supported by Table Olive Interprofessional organization (Interaceituna <https://interaceituna.com/>)

